

- 514.93 KB
- 2022-06-16 12:02:00 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
第十三章达朗贝尔原理班级学号姓名日期十三、达朗贝尔原理13.1求下列刚体惯性力系简化结果。(a)质量为m,半径为r的均质圆盘绕水平轴O作定轴转动,角速度为,角加速度为,试求圆盘的惯性力系向转轴O简化的结果。(在图中画出主矢主矩的方向)rnOnrOFIFIaC.nCFCIaCMMIOICFI(a)(a1)nn2解:1.惯性力系向转轴O简化,主矢Fmamr,,FmamrIICC32主矩MJmr,方向如图(a);IOO2nn22.惯性力系向质心C简化,主矢Fmamr,,FmamrIICC12主矩MJmr,方向如图(a1)。ICC2(b)均质杆OA质量为m,长为l,可绕O轴转动。图示瞬时,角速度为零,角加速度为,试分别求该瞬时杆的惯性力系简化的结果(1)向转轴O简化;(2)向质心C简化。(在图中画出主矢主矩的方向)CCOOAAMaMIOFCICFII(b)(b1)1解:1.惯性力系向转轴O简化,主矢FImaCml,212主矩MJml,方向如图(b);IOO312.惯性力系向质心C简化,主矢Fmaml,IC212主矩MJml,方向如图(b1);ICC12(c)质量为m,长为l的均质杆杆端与质量为m、半径为r的均质圆盘中心固结,绕水平轴O的作定轴转动,角速度为,角加速度为,试求系统惯性力系简化的结果(在图57
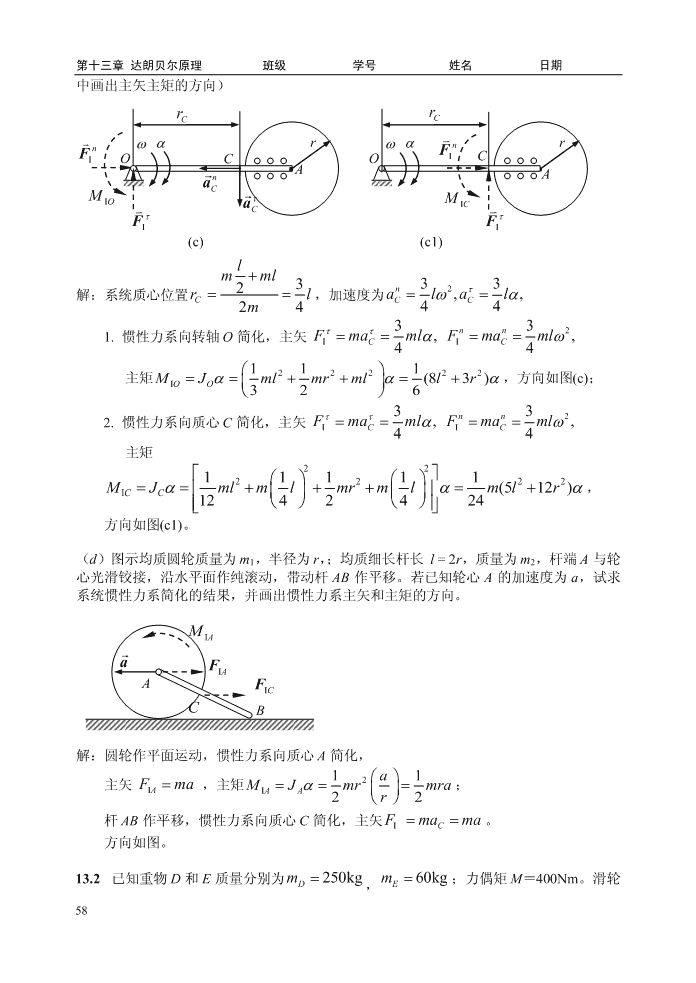
第十三章达朗贝尔原理班级学号姓名日期中画出主矢主矩的方向)rCrCrnrFnFIOCOICnAAaCMIOaMICCFFII(c)(c1)lmml23n332解:系统质心位置rl,加速度为al,,alCCC24m443nn321.惯性力系向转轴O简化,主矢Fmaml,Fmaml,ICIC4412122122主矩MJmlmrml(8l3)r,方向如图(c);IOO3263nn322.惯性力系向质心C简化,主矢Fmaml,Fmaml,ICIC44主矩22121121122MJmlmlmrmlml(512)r,ICC1242424方向如图(c1)。(d)图示均质圆轮质量为m1,半径为r,;均质细长杆长l=2r,质量为m2,杆端A与轮心光滑铰接,沿水平面作纯滚动,带动杆AB作平移。若已知轮心A的加速度为a,试求系统惯性力系简化的结果,并画出惯性力系主矢和主矩的方向。MIAaFIAAFICCB解:圆轮作平面运动,惯性力系向质心A简化,112a主矢FIAma,主矩MIAAJmrmra;22r杆AB作平移,惯性力系向质心C简化,主矢Fmama。IC方向如图。13.2已知重物D和E质量分别为m250kgm60kg;力偶矩M=400Nm。滑轮D,E58
第十三章达朗贝尔原理班级学号姓名日期半径r=20cm,不计滑轮、杆AC、杆BC以及钢丝绳的质量且钢丝绳不可伸长;求重物的加速度和支座A和B的约束反力。MFAArC60FIEBaFBEDmDgmEgFID[解]分析可知AC、BC杆均为二力杆,所以支座A和B的约束反力分别沿杆的轴线方向。画系统的受力图,并虚加惯性力,设物块的加速度为a,则FmaF,ma,IIEEDD由达朗贝尔原理,得MC()F0,FrmgrFrmgrMIIDDEE0M400即(mEmD)a(mDmE)g,(25060)a(25060)9.8r0.22得重物的加速度a0.445(m/s)Fy0,FBcos60FIDFIEmDgmEg0F2(mm)a2(mm)gBDEDEFx0,FAFBsin600代入数据得A、B的约束反力F5412(N)F6249(N)AB13.3已知均质杆OA与OB各长为l,重均为P,一端用铰链固定在铅垂轴上的O点,另一端用水平绳连在轴上的D处,杆与轴的夹角为,令△AOB随轴OD以匀角速度转动。求绳的拉力及铰链O对杆OB的约束反力。59
第十三章达朗贝尔原理班级学号姓名日期ADBFTBECFIFOyPOOFOx[解]OB杆作定轴转动,其惯性力为沿杆方向线性分布,受力如图。线性分布的惯性1lPl2力系的合力过E点,且BEOB,Fmasin。IC33g22llMO()F0,FlTIcosFcosPsin0322l1FP(sintan)T32gFx0,FOxFITF021lFFF(tansin)POxTI26gFy0,FPOy0FPOy13.4均质长方体浪木重为P,悬挂在两根等长的软绳上,OO1=AB,从=30的位置无初速释放开始摆动;求在下面两个瞬时浪木的加速度和两绳的拉力:(1)开始运动瞬时;(2)浪木通过最低位置瞬时。OO1OO1nnFnFT1FInFT2T1aFCFT2BIBCA0.2mACABaAFaaIC2mPCP(c)(a)(b)[解](1)初瞬时浪木受力如图(b),60
第十三章达朗贝尔原理班级学号姓名日期P∵浪木平动且初瞬时各点速度v0,∴aaAO,FaCAICg1F0,PsinFI0,agC2Fn0,FT1FT2Pcos0MC(F)0,FFT1(1cos300.1sin30)T2(0.1sin301cos30)01联立求解得初瞬时浪木的加速度ag;C2两绳的拉力FP0.408;FP0.458T1T2(2)浪木于初始位置平移至最低位置过程,由动能定理得1P22v0Pl(1cos),得v2(1cos)glCC2g最低位置处,受力如图(c),2PnvCF0,FI0即aC0得aCCa2(1cos)ggl或ag(23)CMC(F)0,FFT11T210nFn0,FT1FT2FIP011nnPFF(FP)(aP)T1T2IC22gFF0.628PT1T213.5图示长a=20cm,宽b=15cm的均质矩形板质量为27kg,由销A、销B悬挂,如果突然撤去销B,求该瞬时矩形板的角加速度和销A的约束反力。FAyFAyMIAFAxAABBFAxFIFICCbbMICamgamgCCaa(a)(b)61
第十三章达朗贝尔原理班级学号姓名日期22ab[解1]撤去销子的瞬时,0,矩形板将作定轴转动,a惯性力系向C2,22ab转轴A简化FF即Fmam;IIIC2222MJ11ma(2b2)mabma(2b2)IAA1223ba矩形板受力如图(a),图中sin,cos2222abab由达朗贝尔原理,得aa122MA()F0,MIAmg0,mgma(b)022322abbFx0,FFAxIsin0,FmAx02ab2222abaFy0,FAyFIcosmg0,FAymmg02ab223gaba解得22,FmAx,FAymgm2(ab)222代入数据得矩形板的角加速度47.07rad/s销A的约束反力F95.32NF137.67NAxAy22ab[解2]撤去销子的瞬时,0,矩形板将作定轴转动,a惯性力系向C2,22ab122质心简化FIFI即FImaCm;MICCJma()b212ba矩形板受力如图(b),图中sin,cos2222abab由达朗贝尔原理,得aMA()F0,mgMIICFAC0,22222a122ababmgma(b)m02122222abbFx0,FFAxIsin0,FmAx02ab2262
第十三章达朗贝尔原理班级学号姓名日期22abaFy0,FAyFIcosmg0,FAymmg02ab223gaba解得22,FmAx,FAymgm2(ab)222代入数据得矩形板的角加速度47.07rad/s销A的约束反力F95.32NF137.67NAxAy13.6图示涡轮机的转盘重P=2kN,重心C到转轴z的距离e=0.5mm(图中已夸大),转轴z垂直于转盘的对称面,盘匀速转动,转速n=6000rpm,AB=h=1000mm;求当转盘转到重心C位于yz平面的瞬时,止推轴承A和向心轴承B的静反力和附加动反力。zBFByFBxnhC2FIFAzPhA2xFFAyyAxn6000[解]转盘作匀速定轴转动,角速度628(rad/s),3030P222惯性力系简化为合力Fe0.000562840.2(kN)Ig9.8转盘受力如图,由达朗贝尔原理,得My()F0,FhBx0FBx0Fx0,FFAxBx0FAx0hMx()F0,FhPeFByI0,2e1FPFByIh2e1Fy0,FFAyBy0FAyPFIh2Fz0,FPAz0FPAz63
第十三章达朗贝尔原理班级学号姓名日期e最后得静反力FFP1(kN),FP2(kN)AyByAzgh动反力FFF20.1(kN)AyByI264
第十三章达朗贝尔原理班级学号姓名日期13.7已知均质杆AB重为P,以两根与之等长的绳子悬挂在水平位置;求B端绳子突然断开瞬时A端绳子的拉力。O1O2FIyMFICTxCACaABxABaAFIxPaCA(a)yy(a1)[解](1)在B端绳子突然断开瞬时,杆的角速度及杆上各点的速度均为零,A点轨迹为以O1为圆心、绳长为半径的圆周,则aAOA1nn1杆将作平面运动,由基点法aaaa,aa0,l,CACACACACA2laa,aaCxACyCA2运动分析如图(a1),受力分析如图(a),(设杆长为l,此瞬时杆的角加速度为,)虚2PlPPl加惯性力系MJ;Fmaa,FmaICCIxCxAIyCy12ggg2由达朗贝尔原理,得PaA0ga0FF0,0AxxIPl3gFyy0,PFTIF0PFT0,解得2g2llM()F0,FM0lPl21CCTIFP2FT0T212g4P即:B端绳子突然断开瞬时A端绳子的拉力FT4(2)65
第十三章达朗贝尔原理班级学号姓名日期OOFI2FTM60ICACBACBaAaFAPI1aCA(b)(b1)在B端绳子突然断开瞬时,杆的角速度及杆上各点的速度均为零,A点轨迹为以O为圆心、绳长为半径的圆周,则aOA,杆将作平面运动,Ann1由基点法aaaa,aa0,l,aaa,CACACACACA2CACA2PPlPl惯性力系主矢分量FFmaa,ma,主矩M,I1AAI2CAICgg212g方向如图。由达朗贝尔原理,得1F0,FTFI2sin60Psin600FTmlsin60Psin6002l,MCC()F0,FTIsin60M0Flsin601ml202T21218g23解得,B端绳子突然断开瞬时A端绳子的拉力为FPT13l1313.8已知圆轮重G、半径为R,沿水平面纯滚。若不计滚阻:试问在下列两种情况下,轮心的加速度及接触面的摩擦力是否相等:(1)在轮上作用一矩为M的顺钟向力偶;(2)在轮心上作用一水平向右、大小为M/R的力P。MICMMFICCGGFfF(1)N(1)-a[解](1)轮作纯滚动,设轮心加速度为a,角加速度为,则aR,G1G2GR轮受力如图,惯性力系主矢Fa,主矩MJRaIICCg2g2g66
第十三章达朗贝尔原理班级学号姓名日期由达朗贝尔原理,得MC()F0,MMIfCFR0Fx0,FFfI02Mg2M联立解得a,Ff3GR3RMICCPFICPGGF(2)fFN(2)-a(2)Fx0,PFIfF0而PM/RMC()F0,MIfCFR02MgM联立解得a,Ff3GR3R可见,(1)、(2)两种情况下,轮心加速度相等,而接触面的摩擦力不相等。13.9已知砂轮I质量m1=1kg,偏心距e1=0.5mm,砂轮II质量m2=0.5kg,偏心距e2=1mm。电动转子III质量m3=8kg,转速n=3000r/min。求转动时轴承A、B的附加动反力。ⅠFI2ⅢBAe2e1ⅡFI1FNBFNA10050200502n23000[解]砂轮角速度100(rad/s)6060砂轮I、II的惯性力分别为2322Fme10.510(100)5(N),I1112322Fme0.5110(100)5(N)I222当只求动反力时,受力图中重力可不考虑,由达朗贝尔原理67
第十三章达朗贝尔原理班级学号姓名日期MAF0,200FNB250FI150FI20MBF0,200FNA250FI250FI10解出附加动反力FF73.5(N)NBNA即:转动时轴承A处的附加动反力为73.5N,方向与图示相反;B处的附加动反力为73.5N,方向与图示相同。13.10图示绕线轮重P,半径为R及r,对水平质心C的转动惯量为J,在与水平成C角的常力F作用下纯滚动。试求(1)轮心加速度;(2)绕线轮作纯滚动的条件。TMICRCaCFTFICrPFfFNP[解]研究绕线轮,受力如图,惯性力系主矢Fa,主矩MJICCICCg绕线轮纯滚动时有aR,由达朗贝尔原理,CFx0,FTcosFICFf0Fy0,FNFTsinP0MCF0,FrFRMTfIC0PF(RrJcos)TCFTR(Rcosr)g联立解得a;FCfP2P2JCRJRCgg及FPFsin,再将F、F代入FfFNTNffNPF(RrJcos)TCg得绕线轮作纯滚动的条件为fg)P2(PFsin)(JR)TCg68
第十三章达朗贝尔原理班级学号姓名日期13.11如图所示,质量为m、倾角为的三棱柱与水平面的摩擦不计;质量为m、12半径为r的均质圆柱沿三棱柱斜面向下作纯滚动,求三棱柱的加速度及圆柱中心相对于三棱柱的加速度。aFIrMIOeOOFIearFIrMIOmgOaa2FAAFIefaFDm1gIAmg2FN1()aFN()b()c[解]取圆柱中心为动点,三棱柱为动系,由加速度合成定理aaaaer式中aa为圆柱中心的加速度,aa为三棱柱平动的加速度,a为圆柱中心aOerar相对于三棱柱的加速度,圆柱角加速度,加速度如图(a),系统的受力图及虚加惯r性力系如图(b),圆柱的受力图如图(c),112其中Fma,Fma,Fma,MmrmraI1AeI2eeI2rrIOr2222由达朗贝尔原理,研究系统,Fx0,FIAFIrcosFIe0研究圆柱,MD0,MIOFrFrIrIecosmgr2sin0代入惯性力表达式,得mamacosma01e2r2e1mramarmarcosmgrsin02r2r2e22mgsin22联立解得三棱柱的加速度为a,e23(mm)2mcos1222(mmg)sin12圆柱中心相对于三棱柱的加速度为ar23(mm)2mcos12213.12图示均质圆盘以等角速度绕z轴转动,圆盘平面与转轴z交成角,轴承A和B与圆盘中心相距各为a和b;圆盘半径为R,质量为m,厚度可忽略不计。求两轴承A和B的附加动反力。69
第十三章达朗贝尔原理班级学号姓名日期zBzFByFBxy"byCMIyaMIxxFAzxFAyAFAx[解]在图示坐标系中,由于圆盘上各点的x坐标对于z轴对称,圆盘的惯性积Jxzmixizi0为计算J作圆盘的中心惯性主轴oxyz如图yzJyzmyziiimyi(cosizisin)(sinyizicos)m2JxcossinRsin28以圆盘和轴为研究对象,受力图中惯性力向中心点O简化结果为P2m222Fa0MJRsin2,MJ0ICIxyzIyxzg8由达朗贝尔原理,得Fx0FAxFBx0Fy0FAyFBy0Fz0FAz0MxF0MIxaFAybFBy0MyF0MIyaFAxbFBx022mR联立解得FFF0;FFsin2AxBxAzAyBy8(ab)70
第十三章达朗贝尔原理班级学号姓名日期13.13均质细杆OA、AB的质量均为m、长均为l,用光滑铰链O、A连接如图。初始时两杆均处于水平位置,求系统由静止释放瞬时,两杆的角加速度。FI1FI2FI2FOCABAxAC2BFC2Ox1FMmgOyMmg1Mmg2FIC2IC1IC2Ay解:系统静止释放瞬时,两杆的角速度均为零,OA杆将作定轴转动,AB杆作平面运动。设角加速度分别为1、2n由刚体平面运动基点法,aaaa,式中C2ACA22CAn11a0,al所以al()C2AC2A22C2122112对系统虚加惯性力Fml,Mml,I11IC11212112Fml(),MmlI212IC22212根据达朗贝尔原理,121ll对AB杆MA()F0,ml2ml(12)mg0…..…..(a)12222对系统MO()F0,121ll1213l3lmlmlmgmlml()mg0(b)1121212222122229g3g联立(a)、(b),解得,127l7l71
您可能关注的文档
- 呼伦贝尔盟租房合同-租房协议-房屋租赁合同(最新完美打印版)【宅急信】内蒙古
- 2012年诺贝尔文学奖获得者——莫言ppt课件
- 《诺贝尔》课件1
- 2012年诺贝尔获奖信息及诺贝尔介绍
- 理论力学(第7版)第十三章达朗贝尔定理
- 文学的多元趋向和本位回归从诺贝尔文学奖
- 贝尔法斯特女王大学护理与助产学院
- 浅析《贵妇的画像》中伊莎贝尔的自由观
- 呼伦贝尔市国民经济和社会发展第十二个五年规划纲要
- 13 达朗贝尔原理
- 13 达朗贝尔原理
- 2009年内蒙古呼伦贝尔中考历史试卷及答案
- 2011年内蒙古呼伦贝尔市初中毕业生学业考试一
- 2012年内蒙古呼伦贝尔市中考历史试题
- 2013年呼伦贝尔市初中毕业生学业考试历史试卷.doc987
- 2013年呼伦贝尔市初中毕业生学业考试历史试卷.doc987
- 慕贝尔弹簧卡箍装配工具与使用方法02062010
- 泰胜风能:呼伦贝尔泰胜电力工程机械有限责任公司2MW-5MW风机重型塔架生产基地建设工程 2011-08-10