

- 3.34 MB
- 2022-06-16 12:02:19 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
Chapter14d"AlembertsPrinciple
引言•达朗贝尔原理由法国科学家达朗贝尔(J.leRondD‘Alembert1717--1783)在其著作《动力学专论》中提出。•达朗贝尔原理将非自由质点系的动力学方程用静力学平衡方程的形式表述。或者说,将事实上的动力学问题转化为形式上的静力学平衡问题,即所谓“动静法”。
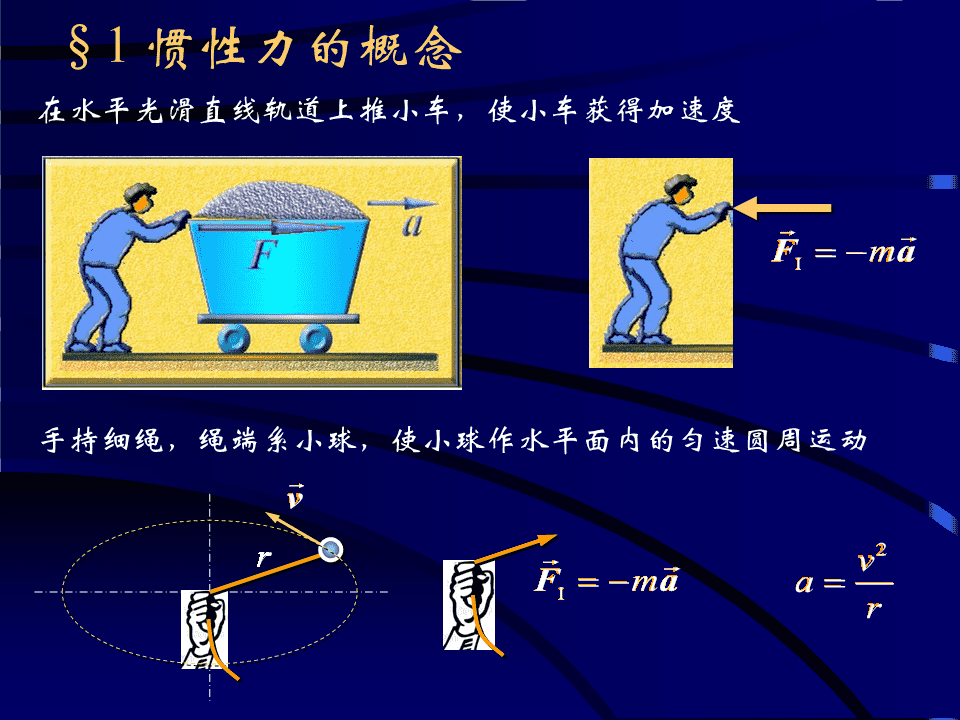
§1惯性力的概念在水平光滑直线轨道上推小车,使小车获得加速度FamI手持细绳,绳端系小球,使小球作水平面内的匀速圆周运动vr2vFamaIr
推广上例可得如下结论质点在作非惯性运动的任意瞬时,对于施力于它的物体会作用一个惯性力,该力的大小等于其质量与加速度的乘积,方向与其加速度方向相反。若用FI表示惯性力,则有FaIm说明①此力是真实的力!②此力作用于施力给质点的物体上!③此力又称为牛顿惯性力!(离心惯性力)
§2达朗贝尔原理MFI一、质点的达朗贝尔原理FN设质点M的质量为m,受力有主动力F、aF约束反力FN,加速度为a,则根据牛顿第二定律,有maFFN令Fam(15-1)I则FFF0(15-2)NI形式上的平衡方程在质点运动的任意瞬时,如果在其上假想地加上结一惯性力FI,则此力与主动力、约束反力在形式论上组成一平衡力系。即质点的达朗贝尔原理。
二、质点系的达朗贝尔原理设质点系由n个质点组成,第i个质点质量为mi,受力有主动力Fi,约束反力FNi,加速度为ai,假想地加上其惯性力FIi=-miai,则根据质点的达朗贝尔原理,Fi、FNi与FIi应组成形式上的平衡力系,即FiFNIiFi0(i=1,2,…,n)对整个质点系来说,在运动的任意瞬时,虚加于质点系的各质点的惯性力与作用于该质点系的主动力、约束反力将组成形式上的平衡力系。即FFF0iNIii质点系的达朗贝尔原理MFO()MFO(NIi)MFO(i)0
质点系达朗贝尔原理的另一种形式:将质点系所受的力按内力、外力来分,外力F(e)如第i个质点受力i内力F(i)in由于质点系的内力总是成对出()iFi0现,所以,内力系的主矢及对i1任意点之矩的主矩恒为零,即n()iMFOi()0所以对整个质点系来说,i1在运动的任意瞬时,虚加于质点系的各质点的惯性力与作用于该质点系的外力组成形式上的平衡力系。外力系主矢惯性力系主矢即()eFFiiI0质点系的()eMFO(i)MFO(Ii)0达朗贝尔原理外力系主矩惯性力系主矩
应用质点系达朗贝尔原理说明①质点系达朗贝尔原理的形式:nn()eFFiiI0ii11nn()eMO(Fi)MO(FIi)0ii11②在解决质点系动力学的两类基本问题上,达朗贝尔原理均适用。但若已知质点系的运动,需要求解该系统的约束反力或外力时,应用达朗贝尔原理尤其方便。③应用达朗贝尔原理的关键是解决质点系的惯性力系的简化问题。
例1图示飞轮质量为m,平均半径r,以匀角速度绕其中心轴转动。设轮缘较薄,质量均匀分布,轮辐的质量可以忽略。若不考虑重力的影响,求轮缘各横截面的张力。ωω分析要求飞轮轮缘横截面的张力,可考虑用假想截面截取部分轮缘,则这部分轮缘在截面的张力及虚加的惯性力作用下处于“平衡”。•见后续
已知飞轮m,r,,求轮缘各横截面的张力。解:用假想截面A、B截取四分之一轮缘为研究对象。y截面A、B处的张力TA、TB为外力,TAA将轮缘分成无数微元弧段,弧长为ωFIids=rd,对每段虚加惯性力FIimmrddnrrd22FmadIiii2r2Bx根据质点系达朗贝尔原理,TA、TB与o惯性力FIi组成形式上的平衡力系,TB列出“平衡方程”,得2mr2dcosT0∑Fx=0,0A122TTmrAB22mr2dsinT0∑Fy=0,B02•见后续
A讨论ω已求得飞轮截面A、B处的张力为B12TTmrAB2可知:飞轮匀速转动时,轮缘各截面的张力相等,且正比于角速度的平方,与其平均半径成正比。若飞轮轮缘的横截面面积为A,则飞轮轮缘横截面的平均拉应力为T12mrAA2若材料的许可应力为[],则飞轮2A[]的设计转速必须遵守mr
§3刚体惯性力系的简化一、刚体作平动在同一瞬时,平动刚体内各点的加速度相等,设刚体质心C的加速度为aC,则aaiCin1,2,m1在各质点上虚加对应的惯性力aCmaFICFaIimiiiCai这些惯性力组成一同向平行力系。mi该力系简化为通过质心的合力FIFIi()miiaaCmimaC平动刚体的惯性力系可简化为通过质心的合力,结其大小等于刚体的质量与加速度的乘积,合力论的方向与加速度方向相反。
例2已知边长b=100mm的正方形均质板的质量为40kg,在铅直面内用三根软绳拉住,如图;求(1)当软绳FG被剪断瞬时板的加速度及AD、DE两绳的张力;(2)当AD、DE两绳位于铅直位置时,板的加速度和两绳的张力。DE60°60°ABFGC
例2续1已知b=100mm,m=40kg,求(1)DE剪断绳FG瞬时绳AD、BE的张力及板a。FA60°yFB60°解:(1)绳FG被剪断后,板在其自身平面内作曲线平动,各点的速ABaA板受力如图。度、加速度均相同。Cb∵剪断绳FG瞬时,v=0,FGFIAax∴a=a=amgCAAC对板虚加惯性力,FI=maC……①b则根据达朗伯原理,有∑Fx=0,mgcos60°-FI=0……②∑F=0,FA+FB-mgsin60°=0……③ybb∑M(F)=0,(FF)sin60(FF)cos600……④CABAB22解得a=4.9m/s2,F=72N,F=268NAB
例2续2已知边长b=100mm,m=40kg,求(2)DE当AD、BE铅直时板a及两绳的张力。60°FAlF(2)当AD、BE铅直时,板受力如图。B设板质心的加速度如图。ABanFC虚加板的惯性力系,且ICFn=man,F=ma……①FGICICaC则根据达朗贝尔原理,有mg-F=0……②Fn∑Fx=0,IIF+F-mg-Fn=0……③∑Fy=0,ABIbb……④∑M(F)=0,FF0CAB222nvC需补充方程。设绳铅直时,质心速度为vC,且aC……⑤l12根据动能定理,有mvC0mgl(1sin60)……⑥2联立上列各式,得n2aa(23)g2.63(m/s)FA=FB=248.5NC
均质矩形块重W,置于粗糙的地面上,动摩擦因数为f,初始时静止。为使矩形块在水平力作用下沿地板滑动而不倾倒,作用点不能太高,求作用点高度的取值范围。baaFFCFICFICdhhmaxFWWhminBABFfAFBAfFFNN
已知W,,动摩擦因数f,初始时静止。使块滑动而不倾倒时水平力F作用点高度h的取值范围。解:设矩形块加速度为a,a虚加惯性力FmaIF当h=hmax时,矩形块处于向前倾倒的临界状态,画受力图。FIChmax列平衡方程:W∑Fx=0,FFF0fIBFA∑F=0,FW0fyN11FNMFA()0,FhmaxbWdFI022又:FfFfNdW解得:h()bfdmax22F
已知W,,动摩擦因数f,初始时静止。使块滑动而不倾倒时水平力F作用点高度h的取值范围。adW已求得h()bfdmax22F当h=hmin时,矩形块处于向后倾倒的临界状态,画受力图。FICF列平衡方程:W∑Fx=0,FFF0hminfIBA∑F=0,FW0FfyNFN11MFB()0,FhminbWdFI022FfFfWfNdWdb解得:h()bfd或:hFfWminmin22F2Fd
dWdb已求得hmax()bfdhminFfW22F2FdaaFFICFIChmaxFWWhminBFfAFBAfFFNNbdb讨论(1)当FfW时,hFfWmind2Fdb当fWFfW时,hmin0d(2)生活经验:在地板上推动柜子
二、刚体绕定轴转动⒈刚体具有与转轴垂直的质量对称面设刚体具有质量对称面S,且S与转轴z垂直并交于O点,C为刚体的质心。选取与z轴平行的细长圆柱体为单元体,刚体转动时,每根单元体均作圆周平移。设第i根单元体的质心Ci在对称面上,至转轴的距离为ri。根据平动刚体惯n性力系的简化,该单元体的惯性力通FIiiFIi过Ci点,且FIi=FIi+FIin式中FIi=miαriFn=m2rIiii对于其它单元体(i=1,2,…,n),其惯性力也在对称面S内。所以,该刚体的惯性力系首先可以简化为在质量对称面S内的平面惯性力系。
刚体绕定轴转动惯性力系的简化(转轴垂直于质量对称面)(续)现将上述平面惯性力系向已知点O简化,MIOαan惯性力系的主矢为FnaCaICFIFIi()mmiiaaiCFIInF所以惯性力系的主矢可写作IiτFnIiFammmaaICCCFIiJO惯性力系的主矩M=∑M(FIi)=∑M(FIi)=∑(-Fr)=-α∑mr2IOOOIiiii∴MIO=-JOα
刚体绕定轴转动惯性力系简化的结论(转轴垂直于质量对称面)当刚体有对称平面且绕垂直于对称面的定轴转动时,其惯性力系向转轴与此对称面的交点O简化,得到对称面内的一个力和一个力偶,该力作用在简化中心O上,大小和方向等于惯性力系的主矢,即方向与质心的加速度方向相反,大小等于刚体的质量与质心加速度的乘积;该力偶的矩等于刚体相对于转轴的惯性力矩,转向与刚体的角加速度的转向相反,大小等于刚体对转轴的转动惯量与角加速度的乘积。MnIOaFmamamaαCICCCaCanCMIO=-JOFI
刚体绕定轴转动惯性力系的简化(转轴垂直于质量对称面)(续)MnIOFmaFFICIIFnIM=-JIOOα若将上述平面惯性力系向质心C简化,将会出现什么结果?M=F·OC-JαICIOM=ma·OC-JαICCO=(m·OC2-J)αFnOI∵J=J+m·OC2OC∴MIC=-JCαFI由此可知,选择不同的简化中心,得到的力总是作用在简化中心,大小和方向是不变的;而惯性力矩的大小则是变化的。
再来看例1图示飞轮质量为m,平均半径r,以匀角速度绕其中心轴转动。设轮缘较薄,质量均匀分布,轮辐的质量可以忽略。若不考虑重力的影响,求轮缘各横截面的张力。ωωω•见后续
例1续1已知飞轮m,r,,求轮缘各横截面的张力。解:用假想截面A、B截取四分之一轮缘为研究对象,y截面A、B处的张力TA、TB为外力,TAA根据题意,重力不计。飞轮匀速转动时ω,四分之一轮缘上的惯性力系向转轴简化的FFII结果是通过质心C和转轴O的一个合力,anCC且F1man/4BxIC4o可以计算或查表得四分之一薄圆环的质心TB位置为2n2aOCOC2rC122∴惯性力合力的大小为F2mrI2根据质点系达朗贝尔原理,TA、TB与惯性力FI组成形式上的平衡力系,列出“平衡方程”:
122例1续2已求得惯性力合力的大小为FI2mr2列出“平衡方程”:yTAMFO()0,TAr-TBr=0FIanC∑Fx=0,-TA+FIcos45°=0C/4x12oTTmrAB2TB由此可知:飞轮匀速转动时,轮缘各截面的张力相等,且正比于角速度的平方,与其平均半径成正比。若飞轮轮缘的横截面面积为A,则飞轮轮缘横截面的平均拉应力为T12mrAA2
例3均质杆OA质量为m,长为l,可绕O轴转动。图示瞬时,角速度为零,角加速度为α,求该瞬时杆的惯性力系向O轴简化的结果,并画出惯性主矢和惯性主矩的方向。解:OA杆作定轴转动,角速度C为零,角加速度为α,OlAaCMIOa2FFCII该杆的惯性力系向O轴简化的结果为112FImaCmlMIOOJml23
nn例3续讨论MIOFFII•若该均质杆由水平位置自由转OA动至角处,则此瞬时杆的惯FττanFIIC性力系向O轴简化的结果又将C如何?并画出惯性主矢和惯性aC主矩的方向。1122l由动能定理可得ml0mgsinA23223sing3cosg求导得l2l该杆的惯性力系向O轴简化的结果为nn2lττl12FmamFmamMJmlICICIOO223
例4已知杆m,l,绕铅直轴作等速转动,形成圆锥摆,角速度。求杆的倾角及球铰O的约束力。解:杆上各点均作匀速圆周运动,加速度水平指向转轴,Om2dmd,asin,ilm2ddFIiimasindld惯性力的合力dmdFIiAlm221FsindmlsinBIl2o惯性力为三角形分布的分布载荷。
已知杆m,l,。求杆的倾角及球铰O的约束力。惯性力的合力12FmlsinIz2F合力的作用点OA2lOzF3OyO根据质点系达朗贝尔原理,y列出“平衡方程”:x12Fy0,FOyFImlsin2CF0,FmgAFIzOzmgMFx()0,122lBmlsinlcosmgsin023223g3gsin(cos)00,,arccos12322l2l
已知杆m,l,绕铅直轴作等速转动,形成圆锥摆,角速度。求杆的倾角及球铰O的约束力。12z已求得FmlsinOy2FOzFmgFOzOy3gO0,,arccosy12322lx讨论:C3g当时,0AFI1mg2l即杆在铅垂位置的自旋为稳定运动;B3g当时,2l杆的倾角为3的圆锥运动为稳定运动。
例5已知电动机定子的质量为m1,用螺栓固定于水平基础上,转轴与地面距离为h。转子质量为m2,偏心距为C1C2=e,t=0时,转子质心位于最低位置。转子以匀角速度ω转动,求基础对电动机的约束反力。C1eC2h
y已知定子m1,h;转子m2,ω,偏心e,求基础对电机的反力。解:研究整个电机系统,受力如图,Cx1对质点系虚加惯性力,其大小为C2F=me2……①hm1gFIII2Fxm2g根据质点系达朗贝尔原理,列出“平衡方程”:AMAFy∑Fx=0,Fx+FIsin=0,……②∑Fy=0,Fy-(m1+m2)g-FIcos=0,……③∑MA(F)=0,MA-m2gesin-FIsinh=0,……④又因为转子匀速转动,有=t……⑤2解得Fxm2esint2F(mmg)mecosty1222Mmeg(h)sintA2
例5简支梁AB重W,轮盘重Q,轮盘半径为r,对质心的转动惯量为J,重物重P。在轮盘的轴承上装有电机,通电时的驱动力矩为M。求重物提升的加速度a及支座A、B的反力。MOABll22
例5续已知梁W,轮盘Q,r,J,重物P。驱动OM力矩M。求重物a及A、B的反力。AQB解:1)研究轮盘及重物系统,lWl进行受力分析。22加惯性力FI,惯性力矩MIaPPaYOMIFaMJJIIgrOXO根据质系达朗贝尔原理,有MQMO()F0,MIIMPrFr0P2MrPr解得agFI2JgPr
2例5续已求得agMrPr2OMIJgPrFAyFMB2)研究整体,进行受力分析。AQBFAxW加惯性力系,系统“平衡”,ll有22Fx0,FAx0……①aPFy0,FAyFBPWQ0……②FIMA()F0,llFlBMII(QW)(PF)rM0……③22即可解得支座A、B的反力FAx,FAy,FB
三、刚体作平面运动时惯性力系的简化这里,仅讨论刚体具有质量对称面,且刚体运动时其质心所在平面与质量对称面重合的情形。在这种情形下,在运动的任意瞬时,虚加于刚体各质点上的惯性力系首先可简化为对称面内的平面惯性力系;然后以质心为简化中心,导出惯性力系的主矢和主矩。刚体的平面运动可分解为随基点的平移和相对基点的转动。在动力学中,总是选取质心为基点。所以刚体的平面运动可分解为MIC随质心的平移和相对质心的转动。aC简化到对称面的惯性力系分为两部分:CFI刚体随质心平动的惯性力系简化为通过质心的一个力;FI=-maC刚体绕质心转动的惯性力系简化为一个力偶。MIC=-JC
刚体作平面运动时惯性力系的简化的结论有对称平面的刚体,平行于该平面运动时,刚体的惯性力系可以简化为在对称平面内的一个力和一个力偶。这个力通过质心,大小等于刚体质量与质心加速度的乘积,其方向与质心的加速度方向相反;这个力偶的矩等于对通过质心且垂直于对称面的轴的转动惯量与角加速度的乘积,其转向与角加速度方向相反。MICaCCFI
两根质量均为m、长均为l的均质杆OA与AB在A处铰接,两杆水平时角速度均为零,角加速度分别为1和2。求该瞬时系统的惯性力系简化的结果,并画出各惯性主矢和惯性主矩的方向。1CAC2B12OaaAaAaC1C2解:OA作定轴转动,aCA21alalC11A12nAB作平面运动,由基点法aC2aAaCAaCA221n1式中alCA22aCA20所以alC2()1222
11已求得al,al(2)C11C21222FI21CAC2MIO112BOaMIC2aC2FC1I1OA作定轴转动,FmaMJI1C1I1OO1惯性力系向轴O简化:AB作平面运动,FmaMJI2C2I2CC22惯性力系向质心C2简化:11FmlFml(2)I11I21222所以1212MI1Oml1MI2Cml2312
已求得11al,al(2)C11C21222maC2122ml1C11AC23BO12mlaaC12C212maC1OA作定轴转动,惯性力系向轴O简化;OA杆的惯性力系也可以向质心简化!maC1maC21C1AC22BO1ml2aC112aC22ml12212
1讨论如何求两杆静止释放瞬时,两alC11,2杆的角加速度?轴承O及铰1al(2)链A的约束力?C2122maC1maC2FC1ABC2Ox12OFmg12mgOy12mlml221212maC2FACBAx2F1mgAy2ml212
质量为m、长为l的均质杆一端用光滑铰链铰接于滑块,滑块在光滑的水平面上滑动,试用广义坐标x及表示AB杆的惯性力系简化结果。xxAaxAaxAAoxoxanCAaCAJCmxCCaA121mlml22BBnaaaaCACACA1n12axalalACACA待续22
质量为m、长为l的均质杆一端用光滑铰链铰接于质量为M、半径为r的轮心A,轮在粗糙的水平面上纯滚动,试用广义坐标x及表示系统的惯性力系简化结果。x12xAMrr2rAAMxaxAoxoxan12xCAaCAml12mxCaA1C12mlml22BBEND
例7均质圆轮半径为r,质量为m,在重力作用下沿倾角为的斜面向下作纯滚动,求圆轮轮心的加速度及斜面的摩擦力。C•见后续
例7续一已知轮m,r,纯滚,θ,求轮心加速度、斜面的摩擦力。解:1)研究圆盘,分析受力:重力mg;斜面反力FN、FS;aaC分析运动:设质心加速度为C,则轮角加速度r2)加惯性力FmaIC12惯性力偶MJICCmrMIC2CFI3)用达朗贝尔原理建立“平衡”方程mgF0,……①aCFSxmgsinFIFS0AFNFy0,FNmgcos0……②MFA()0,mgrsinFrMIIC0……③21解得agCsinFSmgsinFNmgcos33
例7续二讨论FIMIC为保证纯滚动,轮与斜面的静Cmg滑动摩擦系数应为多大?aFSC1FN已求得FmgsinS3FmgcosN保证纯滚动的条件是1FfF即mgsinfmgScosSSN31轮与斜面的静滑动摩擦系数应为ftanS3
例7续三本题如果用第十三章中的平面运动微分方程求解,则需列三个动力学方程再加一个描述只滚不滑约束的MICCFI运动学方程,然后联立求解。但在mgaCFS用动静法解题时,可以对接触点AA列写力矩方程,从而一个方程求解FN一个未知数,避免求解联立方程。由此可见,用动静法解题的一个优点在于选取矩心的灵活性。解毕
思考题:均质圆盘质量为m1,半径为r,均质细长杆长l=2r,质量为m2。杆端A与轮心为光滑铰接。水平拉力为F,使轮沿水平面作纯滚动。不计杆端B与地面的摩擦力。试求地面对B端的法向反力;力F为多大时,B端刚好离开地面?轮纯滚动的条件是什么?(地面静摩擦系数应满足的条件)MIAAFIAFCFICm1gDm2gBFNDFSFNB
法一:先用动能定理求出轮心加速度a,再用达朗贝尔原理,列出系统的平衡方程求解。MIA设轮心速度为v,则AB杆平动的速度也为v,avAFIA由功率方程,得FCFIC2m1gavd1322v1Dm2gBmrmvFv12dtr222FNDFSFNB2Fa32mm12112a则惯性力系FmaMmrmraI1AIA1122rFmaI2C
2F1已求得aMmraMIA32mmI1A122FmaFmaAFIAI2CI1AFCFIC求地面对B端的法向反力求FNBmg1系统“平衡”,由达朗贝尔原理Dm2gBFFSMD()F0,NDFNBrFrFrMFF2cos30r0IAIAICNB2若求地面对D处的反力,B端刚好离开地面的条件:可列方程:F0NBFx0,求FS圆盘纯滚动的条件:Fy0,求FNDFfFSSND
法二:直接用达朗贝尔原理,需要拆分系统。MIAFAyFFAxAIAACFICFCFICam1gBmgBm2gD230°FFNBFNDSFNB研究AB,列方程MA()F0,研究系统,列方程MD()F0,Fx0,Fy0,B端刚好离开地面F0纯滚动的条件:FfFNBSSND•END
例9均质鼓轮铰接在悬臂梁AB的B端,在常力矩M的作用下牵引均质轮C在AB上纯滚动。已知鼓轮、圆轮的质量、半径均为m、r,悬臂梁的长度为l,单位长度自重为q。求圆轮中心C运动到梁的中间位置时,固定端A的约束反力。rmCMABrqml/2l
例9续1MICMaIB已知两轮m,r;梁q,MAFAyCCl;力矩M,求图示位FICmgMM置A端的约束反力。AFAxBql解:⑴求轮B、C的角加速度l/2mg及轮心的加速度l∵轮B、C的半径、质量均相等,轮C纯滚动∴B=C=且aC=r,aB=0对系统虚加惯性力系如图,其大小分别为12FIB=0MJIBBmr212FIC=mrMJICCmr2则系统在主动力、约束反力与惯性力系在形式上处于“平衡”,为平面一般力系问题!整个系统有四个未知量!
法一:可先用动能定理rM求出mCABrq系统动能为m121212TmvJJCCB222121122112222m()rmrmrmr222222dT2mrdWMFd根据微分形式的动能定理dTWF得2M2mrdMd等式两边同除以dt得22mr
例9续2aMICMIBC法二:直接拆分系统,FICC先研究部分再研究系M统,求解未知量。ADBmgMIC取鼓轮C为研究对象,有∑MD(F)=0,FTr-MIC-FICr=0,FFFFFCTTTT再取鼓轮B为研究对象,有FICD∑MB(F)=0,M-MIB-FT’r=0,FFNFBy联立式,可得MIBBFFFTTT’’’M1BMMIBM2mr24FBxMMM1FICIC4mg2r
例9续3已求得MMICM2IB2mrMAFAyCaC1FICmgMMMIB4ABFMFAxICql2rl/2mg1MMlIC4⑵求固定端A的约束反力取整个系统为研究对象,有∑Fx=0,FAx-FIC=0,∑Fy=0,FAy-2mg-ql=0,1∑MA(F)=0,MAMICMIBFrICM(mgql)lmgl02M31解得FF=2mg+qlMmgqlAxAyA2r22
MICM例9续4IBMAFAyCaCFICmg讨论ABFAxqll/2mgl求解本题的其它方法在求出角加速度后,也可取AB梁为研究对象,计算约束反力,但需求出鼓轮的约束力及圆轮的法向反力FN和摩擦力F,不如上述解法简便;本题还可用动能定理的微分形式计算角加速度,然后用达朗贝尔原理求固定端A的约束力和约束反力偶,也很简便。•END
例10已知质量为m1的三棱柱放在光滑水平面上,质量为m2的均质圆柱体O由静止沿三棱柱的斜面向下纯滚动;求三棱柱的加速度。OωOθ
已知三棱柱m1;圆柱m2;静止开始纯滚动;光滑水平面;求a△。解法一:用动力学普遍定理求解。s研究整个系统,受力如图,O∵∑F(e)=0,∴系统在水平方向动量守恒,xveOv设圆柱体O质心由静止沿斜面向下m2gvrO滚动距离s时,三棱柱的速度为v△,圆柱中心速度为vo,系统动量为vvv△△△mm11ggθpmmvv12oFN选O为动点,三棱柱为动系,则由vvvaer所以vOrvvvOxvvrcos系统动量在x方向的投影pxrmv12m(vvcos)0mm12所以vvr(1)mcos2
已知三棱柱m1;圆柱m2;静止开始纯滚动;光滑水平面;求a△。smm已求得vv12.....(1)rOmcos2系统动能为veOmgvra△2v1111O2222Tmv1mv2Omr1v△mg22221θ由动能定理,有FN212122112vrmvmv(v2vvcos)mr0mgssin12rr222222rdsdv对上式求导且知var,并将式(1)代入,ddttmsin22解得ag2即三棱柱的加速度。3mm2msin122
例13-10已知三棱柱m1;圆柱m2;纯滚动;光滑水平面;求a△。MIOm2araeOOaOarm2aea△m2gθm1gm1a△θFN解法二:设圆柱沿斜面滚下时三棱柱的加速度为a△,设圆柱中心加速度为ao,圆柱角加速度为选O为动点,三棱柱为动系,则由aaaear且aae所以aOraa且arr研究整个系统,画受力图,并虚加惯性力112图中惯性力偶为MJmrmraIOr2222
例10已知三棱柱m1;圆柱m2;纯滚动;光滑水平面;求a△。1mra12rm2ar2mra2r2Om2arm2a△Om2gmaF2△sm1gm1a△θDm2gFN1FN研究整个系统,由达朗贝尔原理,Fx0,ma1ma2ma1rcos0研究圆柱,由达朗贝尔原理,1MD()F0,mra2rrmarmgr22sinmar2cos02msin22解得ag3mm2msin2即三棱柱的加速度。122
用动能定理解出,。FOyFn112IJO0mglsinFOx26O23gAanCθBsinMIOCla3FCmgI求导得gcos2l1n1212al,al,Jml,CCO6691nn1212FmamlFmamlMJmlICICIOO669根据达朗贝尔原理,列出“平衡方程”:∑F=0,F+Fsin+Fncos=0,即可解得xOxII∑F=0,F-mg+Fcos-Fnsin=0,FF,yOyIIOxOy
思考题:均质杆长l,质量m。剪断B端绳子瞬时,A端绳子张力?O60°60°CABmg
已知杆长l,质量m。剪断B端绳子瞬O时,A端绳子张力。解法一:用平面运动微分方程FA()emaCxFx,maCxFAcos6060°60a°CCx()eABmaCyFy,maCymgFAsin60aCymg12lJMCC(),FmlFAsin60122应用平面运动加速度分析,取A为基点。ACaCxBnan0,alaAaCaAaCAaCA,CACAaA2aCAl投影得aacos30,aasin30CxACyA2aCy解得:2318g2Fmg,,ag.AA1313l13
均质杆长l,质量m。剪断B端绳子O瞬时,A端绳子张力?1解法二:用达朗贝尔原理,画受力图。mlFA212用平面运动加速度基点法,则ml60°12lCnan0,aBaCaAaCAaCA,CACAA2maAmgFx0,FAcos60maAsin6001Fy0,FAAsin60macos60mlmg0212lACBMC()F0,mlFAsin600122aAaAa2318g2CA解得:Fmg,,agAA1313l13
§4定轴转动刚体的轴承动反力在工程实际中,通常将转动机械的转动部分称为转子。由于材质(质量)不够均匀,制造安装不够准确(既有公差,也有误差),转子的质心未必落在转轴上(偏心),转子的质量对称面未必与转轴垂直(偏角)。转子运转时,这种偏心、偏角误差将产生相应的惯性力,引起零件损坏或剧烈的振动。常常将转子处于静止状态作用于轴承的力称为静压力,转子处于运转状态时作用于轴承的力称为动压力,二者之差,即转子因处于运动状态而附加于轴承的压力称为附加动压力。若考虑轴承对转子的作用,则分别称为静反力、动反力和附加动反力。在高速转子中,轴承的附加动反力远大于静反力,如何有效地抑制、消除转动机械中的附加动反力是值得重视的问题。
为了解定轴转体的轴承动反力,先请看一简单实例。已知两小球质量均为m,以长为2l的细杆相连,绕z轴匀速转动,角速度为。若两球的中心连线⊥z轴,且质心C在z轴上,求轴承A、B反力。AFA解:研究小球系统,受力如图。虚加惯性力,且mllmF=F=mω2lI1I2FI1CFI2mgmgmgmg由质点系达朗贝尔原理,有B∑F=0,F+F-F+F=0FBxxABxI1I2∑F=0,FBy-mg-mg=0FByy∑MB(F)=0,-FAAB=0解得FA=0FBx=0FBy=2mg可见,在这种情况下,轴承动反力与静反力相同!
再看偏心与偏角的情形。•偏心而不偏角•偏角而不偏心AFAFAAhhmemCmmClFI2FI1llFI2lmgI2hhmgFI1mgBmgBFBxFBxFByFByF=m2(l-e)I1F=F=m2lsinI1I2F=m2(l+e)I21222FFmlsin2FA=FBx=meABx2hFBy=2mgFBy=2mg
为进一步研究出现轴承附加动反力的普遍条件,先分析一般情况下定轴转动刚体的惯性力系的简化
定轴转动刚体惯性力系对转轴上任意一点O简化的惯性力偶矩矢的表达式M=(J-J2)i+(J+J2)j-JkIOxzyzyzxzz式中J=∑m(x2+y2)=∑mr2ziii……刚体对z轴的转动惯量Jxz=∑mixz……刚体对z轴的两个离心转动Jyz=∑miyz惯量或惯性积MIz=-Jz……刚体对z轴的惯性力偶矩M=(J-J2)……刚体对x轴的惯性力偶矩IxxzyzM=J+J2……刚体对y轴的惯性力偶矩Iyyzxz
结论定轴转动刚体的惯性力系向转轴上任一点简化的惯性力主矢为FaImC可以求得FIx=m(xC2+yC)FIF=m(y2-x)IyCCFIz=0定轴转动刚体的惯性力系向转轴上任一点O简化的惯性力主矩为MIOMiMjMkIxIyIz可见,若刚体具有与转轴垂直的MIz=-Jz质量对称面,且将坐标系Oxyz的原2点选在转轴与对称面的交点上,则MIx=(Jxz-Jyz)M=J+J2MIOJzkIyyzxz
为求刚体轴承反力,将刚体的主动力系也向点O简化,得一力FR和一力偶MO,FFAy加上轴承反力和惯性力系,Ax则根据达朗贝尔原理,列出“平衡方程”:FIFAx+FBx+FRx+FIx=0……①FAy+FBy+FRy+FIy=0……②FBz+FRz=0……③FRFBy·OB-FAy·OA+Mx+MIx=0……④FBy-FBx·OB+FAx·OA+My+MIy=0……⑤FBxFBz……⑥Mz+MIz=0由方程①…⑤解得轴承反力:•见后续
轴承反力的表达式为1FFAyF[(MFOB)(MFOB)]AxAxyRxIIyxABFI1F[(MFOB)(MFOB)]AyxRyIIxyAB1F[(MFOA)(MFOA)]BxyRxIIyxAB1FRF[(MFOA)(MFOA)]ByxRyIIxyABFByFFBzRzFBxFBz由上式可知:止推轴承沿z轴的反力FBz与惯性力无关。与z轴垂直的轴承反力由两部分组成:由主动力引起的静反力;由惯性力引起的附加动反力。•见后续
轴承附加动反力等于零的条件是:惯性力系主矢等于零,惯性力系对于x轴和y轴的矩等于零。MIx=MIy=0FIx=FIy=0FIx=-maCx=0即FIy=-maCy=0M=J-J2=0IxxzyzM=J+J2=0Iyyzxz结论刚体绕定轴转动时,避免出现轴承附加动反力的条件是:转轴通过刚体的质心,刚体对转轴的惯性积等于零。
刚体的惯性主轴的概念如果刚体对于通过某点z轴的惯性积Jxz和Jyz等于零,则此z轴称为该点的惯性主轴。通过质心的惯性主轴,称为中心惯性主轴。避免出现轴承附加动反力的条件是刚体的转轴应为刚体的中心惯性主轴。
关于转子质量均衡的调试由于制造误差和装配误差,转子的主轴往往不是中心惯性主轴,因此,需要对转子进行质量均衡调试。质量均衡调试分为两大类:在非运转状态下调试转子,称为静平衡---------将转子的质心足够精确地调至转轴上;在运转状态下调试转子,称为动平衡---------将转子的质心足够精确地调试成为中心惯性主轴。
静平衡与动平衡的概念静平衡只能将转子的质心足够精确地调至转轴上;适用于调试的转子类型有:工作转速较低,转子的外径D与其长度l之比D:l≥5。设转子的质量为M,偏心距为e,静平衡的基本思想是在转子质心的另一侧,距离转轴为r的位置上加上质量为m的小物块,且满足mr=Me这样转子的质心就落在转轴上了。mrDeCl
静平衡与动平衡的概念刚性转子动平衡的基本思想是,选取转子上垂直于转轴的两个平面作为质量修正面。在这两个修正面上选取合适的位置,分别加上(或减去)适量的质量,让此二质量所产生的惯性力与此转子原有的惯性力系平衡,转子的转轴就成为中心惯性主轴了。yBAzoLRl1l2x
本章小结质点的惯性力定义为质点的质量与其加速度的乘积,并冠以负号,即FI=-ma质点的达朗贝尔原理:质点上的主动力、约束反力和惯性力组成形式上的平衡力系,即F+FN+FI=0
质点系的达朗贝尔原理:在质点系中对每个质点都假想地加上该质点的惯性力,则作用于质点系的的外力(包括主动力和约束反力)与惯性力系组成形式上的平衡力系。可借用静力学的平衡方程求解动力学的问题:()eFFI0()eMOO(F)M(FI)0
刚体的惯性力系简化结果刚体作平动时,惯性力系简化为一个通过质心的合力FI。FI=-maC刚体绕定轴z转动时,惯性力系向转轴上任意点简化,得一个力和一个力偶,该力等于惯性力系主矢FgR,该力偶的矩等于惯性力系的主矩Mg。FamIC222MMMMIIxIyIz其中2JmxzMIxJxzJyzxzi2JmyzMIyJyzJxzyzi222MJIzzJzmriimxi()y
若刚体具有对称面,该平面与转轴z垂直时,则惯性力系向对称平面与转轴的交点O简化,得在该平面内的一个力和一力偶。FI=-maCMJIOz刚体作平面运动时,若刚体具有对称的平面,则惯性力系向质心简化得一个力和一个力偶。FI=-maCMJICC
刚体绕定轴z转动时,轴承附加动反力等于零的条件为:刚体的转轴是中心惯性主轴。即:(1)转轴通过质心;(2)惯性积Jxz=Jyz=0。
本章结束!