

- 352.31 KB
- 2022-06-16 12:02:00 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
目录第12章达朗贝尔原理(动静法)...........................................................................................21112.1惯性力的概念..............................................................................................................21112.2达朗贝尔原理..............................................................................................................21112.2.1质点的达朗贝尔原理.......................................................................................21112.2.2质点系的达朗贝尔原理...................................................................................21112.3惯性力系的简化..........................................................................................................21312.3.1一般公式...........................................................................................................21312.3.2刚体惯性力系的简化.......................................................................................21412.4定轴转动刚体对轴承的附加动反力..........................................................................221第12章习题.........................................................................................................................223
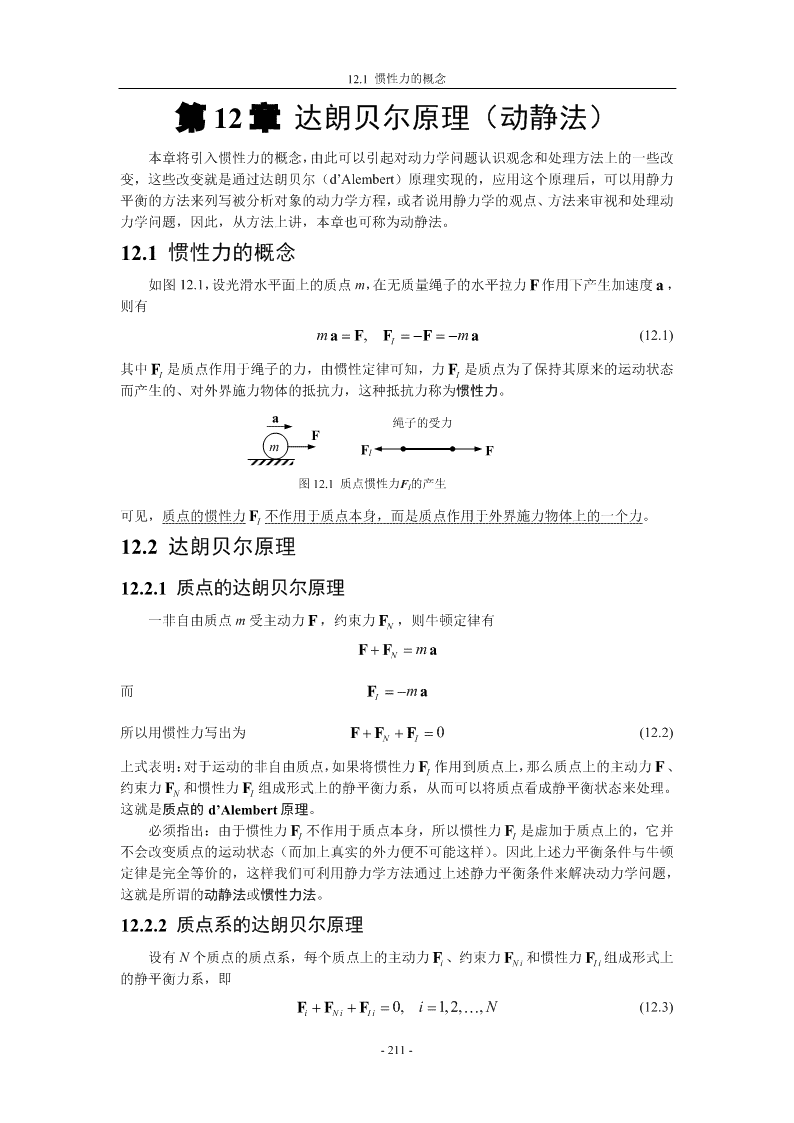
12.1惯性力的概念第12章达朗贝尔原理(动静法)本章将引入惯性力的概念,由此可以引起对动力学问题认识观念和处理方法上的一些改变,这些改变就是通过达朗贝尔(d’Alembert)原理实现的,应用这个原理后,可以用静力平衡的方法来列写被分析对象的动力学方程,或者说用静力学的观点、方法来审视和处理动力学问题,因此,从方法上讲,本章也可称为动静法。12.1惯性力的概念如图12.1,设光滑水平面上的质点m,在无质量绳子的水平拉力F作用下产生加速度a,则有maF=,F=−F=−ma(12.1)I其中F是质点作用于绳子的力,由惯性定律可知,力F是质点为了保持其原来的运动状态II而产生的、对外界施力物体的抵抗力,这种抵抗力称为惯性力。a绳子的受力FmFIF图12.1质点惯性力FI的产生可见,质点的惯性力F不作用于质点本身,而是质点作用于外界施力物体上的一个力。I12.2达朗贝尔原理12.2.1质点的达朗贝尔原理一非自由质点m受主动力F,约束力F,则牛顿定律有NFF+=maN而Fa=−mI所以用惯性力写出为FF++F=0(12.2)NI上式表明:对于运动的非自由质点,如果将惯性力F作用到质点上,那么质点上的主动力F、I约束力F和惯性力F组成形式上的静平衡力系,从而可以将质点看成静平衡状态来处理。NI这就是质点的d’Alembert原理。必须指出:由于惯性力F不作用于质点本身,所以惯性力F是虚加于质点上的,它并II不会改变质点的运动状态(而加上真实的外力便不可能这样)。因此上述力平衡条件与牛顿定律是完全等价的,这样我们可利用静力学方法通过上述静力平衡条件来解决动力学问题,这就是所谓的动静法或惯性力法。12.2.2质点系的达朗贝尔原理设有N个质点的质点系,每个质点上的主动力F、约束力F和惯性力F组成形式上iNiIi的静平衡力系,即FF++F=0,i=1,2,…,N(12.3)iNiIi-211-
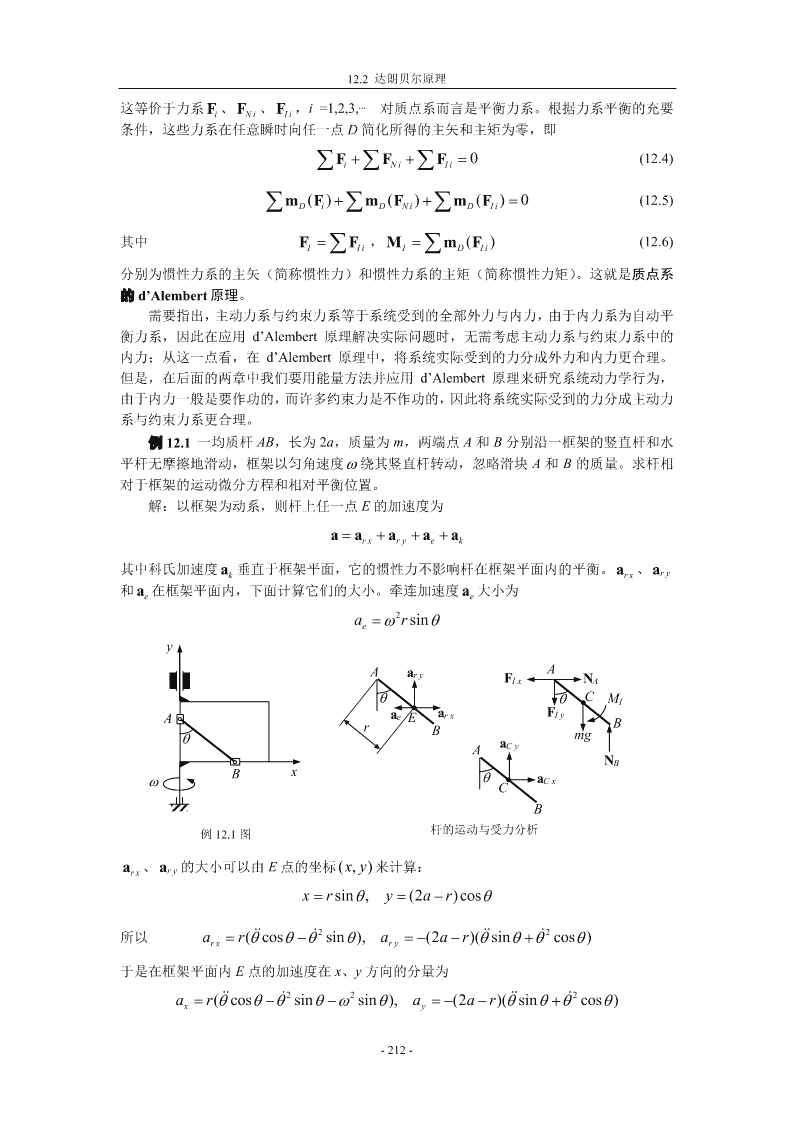
12.2达朗贝尔原理这等价于力系F、F、F,i=1,2,3,⋯对质点系而言是平衡力系。根据力系平衡的充要iNiIi条件,这些力系在任意瞬时向任一点D简化所得的主矢和主矩为零,即∑∑FFiN+i+∑FIi=0(12.4)∑∑mFDi()+mFD(Ni)+∑mFD(Ii)=0(12.5)其中FFII=∑i,MmID=∑()FIi(12.6)分别为惯性力系的主矢(简称惯性力)和惯性力系的主矩(简称惯性力矩)。这就是质点系的d’Alembert原理。需要指出,主动力系与约束力系等于系统受到的全部外力与内力,由于内力系为自动平衡力系,因此在应用d’Alembert原理解决实际问题时,无需考虑主动力系与约束力系中的内力;从这一点看,在d’Alembert原理中,将系统实际受到的力分成外力和内力更合理。但是,在后面的两章中我们要用能量方法并应用d’Alembert原理来研究系统动力学行为,由于内力一般是要作功的,而许多约束力是不作功的,因此将系统实际受到的力分成主动力系与约束力系更合理。例12.1一均质杆AB,长为2a,质量为m,两端点A和B分别沿一框架的竖直杆和水平杆无摩擦地滑动,框架以匀角速度ω绕其竖直杆转动,忽略滑块A和B的质量。求杆相对于框架的运动微分方程和相对平衡位置。解:以框架为动系,则杆上任一点E的加速度为aa=++aa+arxryek其中科氏加速度a垂直于框架平面,它的惯性力不影响杆在框架平面内的平衡。a、akrxry和a在框架平面内,下面计算它们的大小。牵连加速度a大小为ee2a=ωrsinθeyAaryFAIxNAθθCMIAaeEarxFIyrBθBmgaCyANBωBxθaCxCB例12.1图杆的运动与受力分析arx、ary的大小可以由E点的坐标(,xy)来计算:xr==sinθ,y(2a−r)cosθ22所以ar=−(cθosθθsinθ),a=−(2a−r)(θsinθ+θcosθ)rxry于是在框架平面内E点的加速度在x、y方向的分量为222ar=−(θcosθθsinθ−ωsinθ),a=−(2a−r)(θsinθ+θcosθ)xy-212-
12.3惯性力系的简化所以质心C的加速度为222aa=−(θcosθθsinθ−ωsinθ),a=−a(θsinθ+θcosθ)CxCy将框架平面内的惯性力系向A点简化,惯性力主矢为Fm==ama(cθosθθ−22sinθ−ωsinθ)IxCx(a)Fm==a−ma(sθθin+θ2cosθ)IyCy由于选取的动系不作平动,所以惯性力主矩不能直接按照公式(12.9)在这个动系中计算,我们按照定义式(12.6)直接计算。惯性力主矩为22aammMr=⋅cosθθadr+rsin⋅adrIx∫∫y0022aa2am=−rd22cosθθ(cosθθsinθ−ω2sinθ)r∫02a(b)2am−−ra(2r)sinθθ(sinθ+θ2cosθ)dr∫02a=−24mmaa22(2θcosθθsin2θ−3θ2sinθcosθ)−2ω2sinθcosθ33按照达朗贝尔原理立平衡方程:∑mA=0:MNIB−×2sainθ+mgasinθ=0(c)∑Fy=0:FmIy+g−NB=0(d)由(c)、(d)消去N,得BMF−+()mg×2asinθ+mgasinθ=0(e)IIy将(a)、(b)代入(e),得24mmaa22(2θcosθθ−−sin2θ3θ2sinθcosθ)−2ω2sinθcosθ33−−[(maθθsin+θ2cosθ)+mg]×2asinθ+mgasinθ=0整理得,杆相对于框架的运动微分方程为23gθω−−sinθcosθsinθ=04a当θ≡0时杆相对平衡,相对平衡位置为zDθ=0C从图显然可见,这个平衡位置是不稳定的,因为一旦aDmirC杆偏离平衡位置,就不能回复。rFIiiDyD12.3惯性力系的简化xD12.3.1一般公式图12.2惯性力系向任一点D简化-213-
12.3惯性力系的简化如图12.2,任一瞬时的惯性力系向任一点D点简化。惯性力系的主矢为FF==−ma=−Ma(12.7)II∑i∑iiC因此,惯性力主矢的大小和方向与简化中心无关,但是主矢代表的惯性力合力必须作用在简化中心。惯性力主矩可以按照定义式(12.6)直接计算,如例12.1所示。但是,对于很多物体,在跟随简化中心D平动的坐标系中计算相对运动惯性力主矩更方便,下面推导这个公式。我们在简化中心D上附加一个平动动系Dxyz,如图12.2所示,可得DDDMmID==∑∑()FIi−ri×mmiai=−∑ri×i(ari+aD)=−∑∑raii×mmri−raii×D=−∑rai×miri−(∑miri)×aD(12.8)=×∑raii()−mMri+rC×(−aD)其中r为平动参考系中看到的质心C的矢径。上式将惯性力主矩分解为两项,第一项为平C动参考系中看到的惯性力主矩,即相对运动惯性力主矩;第二项为质点系的质量集中到简化中心D产生的惯性力矩,为了简化计算,我们希望这一项不出现,这可以通过选择特殊的简化中心做到,选择方法与相对运动动量矩定理中的特殊动矩心相同,这三种特殊的简化中心为:(1)选择D点=C点,这时rr=0(⇒×−Ma)=0;CCD(2)选择加速度为零的点作为D,这时ar=0(⇒×−Ma)=0;DCD(3)选择加速度矢量通过质心C点的点作为D,这时ar||⇒×r(−Ma)=0;DCCD因此,我们以后总是选择这三种特殊的简化中心D,进而惯性力主矩为MrIi=×∑(−miari)(12.9)结论:在选择特殊简化中心的条件下,惯性力主矩等于相对运动惯性力主矩。12.3.2刚体惯性力系的简化在图12.2中,将其中的质点系看作刚体,则刚体的惯性力主矢仍然为方程(12.7)。刚体相对于平动坐标系Dxyz为定点转动,刚体上任意质点的相对速度和相对加速度为DDDv=×ωra,=α×r+ω×vriiriiri其中ω,α为刚体的瞬时角速度和角加速度矢量。将上式代入(12.9),得MIi=×∑m()αri+ω×vrri×i=×∑mii((αr+ωω××rri))×i由矢量运算公式()UV××W=(U⋅W)V−(W⋅V)U,上式可以写为MIi=×∑m[(αri+ω⋅ri)ωω−(⋅ω)rri]×i=×∑mii[(αrr)×i+(ω⋅ri)ω×ri]=⋅∑mii[(αrr)i−(ri⋅ri)αω+(⋅ri)ω×ri]即MIi=⋅∑m[(αrri)i−(ri⋅ri)αω+(⋅ri)ω×ri](12.10)其中r为从简化中心D指向刚体上的质点m的矢径。式(12.10)给出了刚体惯性力主矩的一ii般公式。下面应用公式(12.7)和(12.10)计算平动刚体、定轴转动刚体和平面运动刚体的惯性力主矢和主矩。-214-
12.3惯性力系的简化(1)平动刚体取简化中心为质心C,因为ωα=≡0,所以,由公式(12.7)和(12.10),得Fa=−M,M≡0(12.11)ICIzω,αω,αzzω,αnFICFICyDDCyτyFIτxFnxFIxI简化中心D在转轴上简化中心为质心C图12.4平面运动刚体惯性力图12.3定轴转动刚体惯性力系简化系简化(2)定轴转动刚体如图12.3,取简化中心为转轴上任意一点D、或质心C,惯性力主矢为nnττFa=−MM=−a−MaF+F(12.12)ICCCII为了计算惯性力主矩,我们以简化中心D为原点再建立一个正交坐标系Dxyz,取z轴与转轴重合或平行;原则上Dxyz可以作任意运动,但一般按两种取法,一种取法是让Dxyz随D平动,这时它可以取代Dxyz;另一种取法是与刚体固连。下面,我们将方程(12.10)DDD在坐标系Dxyz中写成投影式;按照坐标系Dxyz的取法,有ω=ωk,α=αk,由公式(12.10),得惯性力主矩为MIi=⋅∑m[(αrri)i−(ri⋅ri)αω+(⋅ri)ω×ri]2=⋅∑mrii[(ααkr)ri−ik+(ωkr⋅i)ωk×ri]22=−∑mzii[]ααrkiri+ωzik×ri22=+∑mzii[(ααxiijyi+zik)−rik+ωzi(xij−yii)]2222=−∑mzii[(αωxiziyi)ij+(αziyi+ωxizi)−α(xi+yi)k]2222=−(αω∑mziixi∑∑mzyiii)(i++αωmizyii∑mixizi)j−α∑(xi+yi)k22=−()αωJJij++(αJωJ)−αJkxzyzyzxzz22即Mi=−()αωJJ++(αJωJ)j−αJk(12.13)Ixzyzyzxzz其中Jxy=Jyx=∑mixiyi,Jyz=Jzy=∑miyizi,Jxz=Jzx=∑mixizi为刚体对坐标轴的惯性积;J为刚体对z轴、即转轴的转动惯量。方程(12.13)写成分量形式为z22M=−αJJωα,M=J+ωJ,M=−αJ(12.14)IxxzyzIyyzxzIzz需要说明两点:(1)由于z轴本身为转轴或平行于转轴,因此无论坐标系Dxyz是否与刚体固连,J为常量,且对z轴的惯性力矩M的表达式不变;(2)但是,当坐标系DxyzzIz-215-
12.3惯性力系的简化不与刚体固连时,惯性积Jyz和Jxz一般会随时间变化,因此即使对匀速转动刚体,关于x、y轴的惯性力矩M和MIy一般也会随时间变化;反之,如果坐标系Dxyz与刚体固连,则Ix惯性积Jyz和Jxz为常量。(3)平面运动刚体如图12.4,在刚体的质心运动平面上,取特殊简化中心D。惯性力主矢为F=−Ma(12.15)IC建立坐标系Dxyz,令z轴与刚体平面运动角速度、角加速度矢量平行,则刚体在平动动系Dxyz中绕z轴定轴转动,因此惯性力主矩在坐标系Dxyz中的投影式与方程(12.13)DDD完全相同,即22Mi=−()αωJJ++(αJωJ)j−αJk(12.16)Ixzyzyzxzz惯性力矩的分量为22M=−αJJωα,,M=J+ωJM=−αJ(12.17)IxxzyzIyyzxzIzz可见,要保持刚体作平面运动,一般需要约束力系和主动力系对D点的矩能够将x、y轴方向的惯性力矩M和MIy平衡掉。Ix例12.2一均质杆AB,长为l、质量为m,A端与铅垂轴铰接,B端用一段水平细绳与转轴相连;转轴以匀角速度ω转动。求绳中张力。z解:杆AB定轴转动,取固连正交坐标系Axyz,则Jxz=0TBllmm2Jz==ydrrcosθθsindryz∫∫00llθMIx1mg2FI=mlcosθθsinAy3ll22mm2122xJy==drrsinθdr=mlsinθz∫∫00ll3例12.2图将惯性力系向A点简化,得惯性力主矢和主矩为12Fm==amωlIC2122Mm=−ωθlcossinθ,M=0,M=0IxIyIz3【杆AB】1∑mx=0:Tlcosθθ+MIx−=mglsin02112解得Tm=+ωlsinθθmgtan32例12.3两个均质圆柱A、B的重量分别为P和P,半径分别为r和r,用一根不可伸1212长的细绳缠绕连接,细绳AB段成铅垂线。圆柱A可绕固定轴A自由转动,圆柱B在重力作用下由静止下落。求两个圆柱的角加速度、柱心B的加速度以及绳中的张力。解:两个圆柱一个作定轴转动、一个作平面运动,运动和受力分析如图。两个圆柱的惯性力主矢和主矩为-216-
12.3惯性力系的简化11PP1222P2M==rFα,,aM=rα(a)II1112BI22222gggAα1T’FI2MI1AMI2DBα2BP1TP2aB受力分析例12.3图【圆柱A】∑mA=0:Tr11−MI=0【圆柱B】∑Fy=0:FTI22+−=P0∑mD=0:()PF22−IIr2−=M20将式(a)代人以上三式,得1P12Tr−rα=0(b)1112gP2aT+−P=0(c)B2gPP2122()Pa−r−rα=0(d)22B22gg2运动协调关系:ar=α+αr(e)B1122由(b)~(e)解得:2gP2gP21α=,α=12rP(3+2P)rP(3+2P)1122122(PP+)PP1212ag=,T=B(3PP+2)32PP+1212例12.4均质圆柱A的半径为r,质量为M,均质杆AB的长度为l,质量为m。铰A和墙B处都是光滑接触,地面粗糙使得圆柱作纯滚动。初始时系统静止,且θ=45°,然后释放,求初始时刻杆AB的角加速度、A点和B点的加速度。解:本题两个物体均作平面运动,不难判断AB杆的加速度瞬心为D点。于是两个物体的惯性力主矢和主矩为-217-
12.3惯性力系的简化1122FM==a,,MMrαF=ma,M=mlα(a)IAAIAAIDCIDAB23FIDBF’AyNBDMIAMIDaBF’AxAFIADBCMgEFEmgθANαaαABFAxEACCFAyDBaAAαABaτBAaBC例12.4图aCaAA受力和加速度分析【AB杆】22∑mD=0:MFID+×Axl−mg×l=024【圆柱A】∑mE=0:MFIA+IAr−=FAxr0以上两式消去F并考虑到(a)式,得Ax11222mlαα++()MrMa×l−mg×l=0(b)ABAA3224对AB杆作加速度分析。以A为基点分析B点的加速度,得τaa=+aBABA上式向水平方向投影,得22τaa+=0⇒a−lα=0(c)ABAAAB22对圆柱有a=rα(d)AA方程(b)、(c)和(d)联立解得32mgα=ABlm(4+9M)23mg而aa==lα=ABAB24mM+9-218-
12.3惯性力系的简化例12.5均质杆AB长为l,质量为m,用两根等长度的细绳悬挂在固定点O,现在将绳OB剪断。求剪断瞬时AB杆的角加速度和绳OA的张力。OOOaAaCyFIyTθθMIABACaCxBAFIxCBα例12.5图aτCAmg运动、受力分析解:杆的惯性力主矢和主矩为12Fm==a,,FmaM=mlα(a)IxCxIxCyI2【杆AB】∑Fx=0:TFcosθ+Ix=0∑Fy=0:TFsinθ−Iy−=mg0l∑mC=0:TMsinθ×−=I02将(a)式代入以上三式,得ma=Tcosθ(b)Cxma=Tsinθ−mg(c)Cy11mlα=Tlsinθ(d)122τ加速度分析,得aa+=a+aCxCyACA上式向OA方向投影,得τ1aa+=−asinθ⇒a+=a−lαsinθ(e)CxCyCACxCy2方程(b)~(e)联立解得26sinθsinθα=g,Tm=g22l(1+3sinθ)13+sinθ例12.6均质杆AB、BC长度均为l,质量均为m,A、B处为光滑铰接。系统在AB杆水平、BC杆铅垂位置静止释放。求释放瞬时支座A的反力。aFAyFI2yBADBADBFAxFI2xα1MI1aDFmgMI2I1aEBEEα2mgCC例12.6图受力分析-219-
12.3惯性力系的简化解:AB杆的惯性力系向A点简化,惯性力主矢和主矩为112Fm==amlα,M=mlα(a)ID11I1123B点的加速度a通过BC杆的质心E,所以可将BC杆的惯性力系向B点简化;因为Bτaa=+aEBEB因此BC杆的惯性力主矢和主矩为τ112Fm==amlα,F=ma=mlα,M=mlα(b)Ix22EBI2yB1I2223【BC杆】∑mB=0:MI2=0考虑到式(b),得:α=0,F=0(c)2Ix2【整体】1∑mB=0:MmII12−gl−+mglFyl=029g考虑到式(a)、(b),得α=(d)18l∑Fx=0:FFAx+I2x=0得F=0Ax∑Fy=0:FFAy+I12+−FIy20mg=5考虑到式(a)~(d),得Fm=gAy16例12.7曲柄摇杆机构如图所示,已知OA杆的角速度ω为常值,OA杆质量为m、长0度为r;BD杆视为均质细杆,质量为8m、长度为3r;OB为铅垂线,图示瞬时,OA水平、θ=30°;整个机构在铅垂面内,不计滑块A的质量和各处摩擦。求图示瞬时驱动力偶矩M。解:运动学分析:DvAvr33ω0Mvev=v=ωrOrA022AAvωrω=e=0BABA4rθ3ω2rϕBA0av==2ωCBAr4BBnτ速度分析aa=+a+a+aAreeC例12.7图此式向a方向投影得C-220-
12.4定轴转动刚体对轴承的附加动反力2τ33ω0raraaeC=−+aA=aC24aAAτaeτ2a3ωane0α==eBABA8动力学分析:I1222αBAM=8m⋅9rα=33mωrBBA03B【BA杆】加速度分析3rID∑mB=0:FA×2r+8mg×−MB=04AMF’A2FA33mωr0F=−3mgAOA2mg【OA杆】IMrFAB8mg∑mO=0:M−mg+r=022B332得M=2mgr−mωr受力分析04ω,αzFAyAFAxlADτlyCnlBxBFByFBxFBz图12.5定轴转动刚体及其轴承约束力12.4定轴转动刚体对轴承的附加动反力如图12.5所示为一个一般的定轴转动刚体,定轴转动刚体也称为刚性转子。取转轴上D点为惯性力系的简化中心,取坐标系Dxyz,z轴与转轴重合,Dxyz它可以与刚体固连、也可以不固连。由方程(12.12),惯性力主矢为nτ2Fa=−M=−MMa−a=−Mωαrn−MrτICCCCC(12.18)22=+Mx()ωαyij+M(ωy−αx)CCCC-221-
12.4定轴转动刚体对轴承的附加动反力由公式(12.13),得惯性力主矩为22Mi=−()αωJJ++(αJωJ)j−αJk(12.19)Ixzyzyzxzz其中Jxy=Jyx=∑mixiyi,Jyz=Jzy=∑miyizi,Jxz=Jzx=∑mixizi为刚体对坐标轴的惯性积;J为刚体对z轴的转动惯量。当xy平面为刚体的质量对称面,z或z轴为刚体的质量对称轴时JJxz=yz=0,这时z轴为刚体的惯性主轴,惯性力主矩在x、y轴上无分量。下面求出轴承A,B处的支座反力的表达式。设主动力系向D点简化结果为:⎧⎪主矢:Fij=+FF+Fkxyz⎨⎪主矩:Mi=+MMj+Mk⎩FFxFyFz约束反力为轴承的支座反力,向D点简化的结果为⎧⎪主矢:Fi=+()FF+(F+F)j+FkNAxBxAyByBz⎨⎪主矩:Mi=−()FlFl+(Fl−Fl)j+0k⎩NByBAyAAxABxB由d’Alembert原理,有FF++F=0,M+M+M=0NIFNI写成投影形式,可得6个平衡方程:2FF+++FM()ωαx+y=0xAxBxCC2FF+++FM()ωαy−x=0yAyByCCFF+=0zBz2MF+−lFl+αωJ−J=0FxByBAyAxzyz2MF+−lFl+αωJ+J=0FyAxABxByzxzMJ−=α0Fzz第6个方程为刚体的定轴转动动力学方程。由前5个方程解得,轴承支座反力为122FF=−[(l+M+Mlωαx+y)+(αJ+ωJ)]AxxBFyBCCyzxzl122FF=−[(l−M+Mlωαy−x)−(αJ−ωJ)]AyyBFxBCCxzyzl122FF=−[(l−M+Mlωαx+y)−(αJ+ωJ)]BxxAFyACCyzxzl122FF=−[(l+M+Mlωαy−x)+(αJ−ωJ)]ByyAFxACCxzyzlFF=−Bzz以上各式中与转动有关(与ω,α有关)的项称为轴承的附加动反力,它们为-222-
第12章习题()d122FM=−[(lωαx+y)+(αJ+ωJ)]AxBCCyzxzl()d122FM=−[(lωαx+y)−(αJ+ωJ)]BxACCyzxzl()d122FM=−[(lωαy−x)−(αJ−ωJ)]AyBCCxzyzl()d122FM=−[(lωαy−x)+(αJ−ωJ)]ByACCxzyzl如果刚体不转动,轴承支座反力中便不会出现以上这些项。当转子的转速较高或很高时,附加动反力的量是很大的,会对轴承和机械造成损害,甚至发生安全事故,因此希望消除附加动反力。从上式可见,为了消除附加动反力,要求转子满足以下条件:2⎧αJ+ω2J=0⎧⎪ωxC+αyC=0⎪yzxz⎨,⎨22⎪⎩ωyC−αxC=0⎪⎩αJxz−ωJyz=0将它们写成矩阵形式的线性方程组为22J⎡ωα⎤⎧xC⎫⎡ωα⎤⎧xz⎫⎢2⎥⎨⎬=0,⎢2⎥⎨J⎬=0⎣−αω⎦⎩yC⎭⎣α−ω⎦⎩yz⎭这是两个齐次线性方程组,只要转子运动,ω和α就不会同时等于零,因此它们的系数矩阵行列式一定不为零,方程组只有零解。由此得到消除附加动反力的条件为(1)xy==0——即转轴通过转子质心,这种情况称为静平衡。CC(2)J=J=0——即转轴为惯性主轴,这种情况称为动平衡。xzyz结论:要消除转子对轴承的附加动反力,转轴必须为转子的中心惯性主轴。第12章习题12.1质量m=0.01kg的质点,在半径r=0.1m的圆环内按箭头方向以相对速度u=0.5m/s作匀速运动,圆环以匀角速度ω=5rad/s绕O轴转动。求此质点在点1、2处的惯性的大小;并将惯性的方向画在题图上。12.2已知曲柄OA&OB,OA=OB=r,转动角速度和角加速度分别为ω和α。11ABCE为一个弯杆,滑块E的质量为m。求滑块E的惯性力的大小;并将惯性力的方向画在图上。DuEO2230°CvCaC1ωABCαrωO160°OO题12.1图题12.2图题12.3图12.3质量为m,半径为r的均质圆轮,沿水平轨道作纯滚动。已知轮心在某瞬时的速度v和加速度a,此时惯性力系向速度瞬心简化所得主矢和主矩的大小,在下述五种答案CC中正确的是:()。2123(a)Fm=v/,rM=mra;(b)Fm==v/,rMmra;ICICICIC22-223-
第12章习题13(c)Fm=a,M=mra;(d)Fm==a,Mmra;ICICICIC2242vC3(e)Fm=+a,M=mra。IC2ICr212.4对固连于刚体的直角坐标系Oxyz而言,x轴是刚体对O点的一根惯性主轴需要满足什么条件?若x轴是刚体对O点的一根中心惯性主轴,还需满足什么条件?OOnOOnFFIICFτCCFτCMInIMInIFFτIτIFIMIFIMI(a)(b)(c)(d)题12.5图12.5质量为m,长为L的均质细直杆绕O轴转动,角速度ω与角加速度α均为逆时针转向,在下列四种惯性力系的简化情况中正确的是:()。12τ12n12(a)M=mLα,F=mLα,F=mLω;III32212τ12n12(b)M=mLα;F=mLα;F=mLω;III122212τ1n12(c)M=mLα;F=mLα;F=mLω;III122212τ1n12(d)M=mLα;F=mLα;F=mLω。III32212.6边长为L=0.5m的均质方立方体A,重为P=1kN,放在运输车B上,接触面间的摩擦系数f=0.2,试问车的加速度取何值时,才能保证重物安全运输(既不翻转,也不滑动)。BAAaOB0.15mDC0.2m题12.6图题12.7图12.7均质长方形平板ABCD,其质量m=27kg,尺寸如图所示。于A点用光滑铰链悬挂起来,自AB边水平时静止释放,求释放后的瞬时板绕A转动的角加速度和A点的约束反力。12.8均质杆AB长2L,重P,沿光滑的圆弧轨道运动。杆的质心C与圆弧中心O的D距离为L。开始运动时,杆与水平直径成θ=45角,初速为零。求此时轨道对杆的约束力。OBωθABCPAC题12.8图题12.9图12.9嵌入墙内的悬臂梁的B端装有重为G,半径为R的均质鼓轮(可视为均质圆盘)。-224-
第12章习题有主动转矩M作用于鼓轮以提升重为P的重物C。设AB=L,梁和绳的重量都略不去不计,求固定端支座A处的约束反力。12.10均质杆重为P,长为L,用两根等长的绳索悬挂如图所示。求一根绳突然断开时,杆的质心加速度a及另一根绳的拉力T。CABLLP44CDACB题12.10图题12.11图12.11均质平板AB质量为m,放在半径为r,质量均为m/2的两个相同的均质圆柱形滚子上。平板上作用一水平力P,滚子在水平面上作纯滚动,平板与滚子之间无相对滑动。试求平板的加速度。12.12长为L、质量为m的两个相同的水平均质杆AB和CD以软绳AC与BD相连,并在AB的中点用铰链O固定。求当绳BD被剪断的瞬间B与D两点的加速度。AABOBCDC题12.12图M题12.13图12.13均质杆长L=1m,质量m=10kg,B端铰链于直径d=0.5m、质量1m=20kg的均质圆盘上。B与圆盘中心C相距e=0.23m。若在圆盘上施加力偶矩为2M=15N⋅m的力偶,试求此瞬时杆AB和圆盘的角加速度。12.14半径为r的均质圆盘B,由均质连杆AB和曲柄OA带动在半径为5r的固定圆上作纯滚动。AB=4r,OA=2r。OA杆以匀角速度3ω转动,求图示瞬时固定圆对圆盘B的约束力。圆盘B和连杆AB的质量均为m。A3ω30°OBRrCA5rB题12.14图题12.15图12.15均质滑轮A用一绳悬于天花板上,另一绳悬重物B,绳重不计。开始时滑轮和重物同时由静止释放。滑轮重P=50kN,重物重P=100kN,r=0.1m,R=0.2m,AB滑轮对中心轮的回转半径ρ=0.15m。求滑轮中心A与重物B的加速度及两绳的张力。12.16一质量为m长为L的单摆,其上端连在圆轮的中心O。圆轮的质量为m,半径12为r,可视为均质圆盘。圆轮放在水平面上,圆轮与平面间有足够的摩擦力阻止滑动。求在-225-
第12章习题图示位置无初速地开始运动时,轮心O的加速度。OO1θAOm1题12.16图题12.17图12.17均质杆OA在铅垂面内绕水平轴O转动时,推动均质圆盘在水平面上作纯滚动。11已知圆盘质量为m,半径为R,杆的质量为m,长为2R,不计杆与圆盘间摩擦。试求系1D统在杆的重力作用下,自图示位置(圆盘圆心O正好位于O的正下方,且∠AOO=45)11由静止开始运动时,杆OA的角加速度。112.18质量为m,半径为r的圆环O,铅垂放在水平面上作纯滚动。在圆环的边缘上刚性连接一质量为m的质点A。试用动静法建立系统的运动微分方程。ChOϕABAωL题12.18图题12.19图12.19质量为m的均质直角三角形薄板,绕直角边AB以匀角速度ω转动。尺寸如图所示,求在图示位置时轴承A、B的附加动反力。-226-
您可能关注的文档
- 13 达朗贝尔原理
- 2009年内蒙古呼伦贝尔中考历史试卷及答案
- 2011年内蒙古呼伦贝尔市初中毕业生学业考试一
- 2012年内蒙古呼伦贝尔市中考历史试题
- 2013年呼伦贝尔市初中毕业生学业考试历史试卷.doc987
- 2013年呼伦贝尔市初中毕业生学业考试历史试卷.doc987
- 慕贝尔弹簧卡箍装配工具与使用方法02062010
- 泰胜风能:呼伦贝尔泰胜电力工程机械有限责任公司2MW-5MW风机重型塔架生产基地建设工程 2011-08-10
- 第16章 达朗贝尔原理(动静法)
- 大众传媒_大众文化_文化危机_丹尼尔_贝尔批判性传播观述评
- 诺贝尔之路和共用资源的自治之道
- 呼伦贝尔安全保证措施报审表
- 2016内蒙古呼伦贝尔事业单位招聘352人简章(含9名教师岗)
- 《诺贝尔》课件
- Windows XP系统加固与热修复方案_上海贝尔
- 南京河西新城区CBD一期景观贝尔高林
- 贝尔一号_蓝牙电子狗说明书