

- 906.49 KB
- 2022-06-17 15:05:18 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
CN43—1258/TP计算机工程与科学第36卷第4期2O14年4月ISSN1OO7130XComputerEngineering8LScienceVo1.36.No.4。Apr.2014文章编号:1007—130X(2014)04—0719-06三维编织复合材料编织工艺过程仿真研究肖来元,寇晓菲,左惟伟(华中科技大学软件学院,湖北武汉430074)摘要:总结了四步编织工艺的运动规律。对纱线的空间坐标进行三次B样条曲线拟舍得到拟合坐标;设计实现了纱线实体的静态模型算法,根据拟合坐标得到纱线空间网格坐标并建立了纱线实体的静态模型;实现了纱线轨迹的动态展示以及实体生成过程的动态展示;构建了GUI界面并编译成了可脱离Matlab环境的独立运行程序。关键词:三维编织;静态模型;动态仿真;图形用户接口中图分类号:TP391.9文献标志码:Adoi:IO.3969/.issn.1007—13OX.2O14.04.025Study0nthesimulation0f3一Dlbrat‘d1ed1composi‘t·eslbrai⋯dingpFocessXIA()Lai—yuan。KOUXiaofei,ZUOWei—wei(SchoolofSoftware,HuazhongUniversityofScienceandTechnology,Wuhan430074,China)Abstract:Themotionlawoffour—stepbraidingtechniqueissummarized.ThroughcubicB—splinecurvefitting,thefittingcoordinatescanbegotfromthespatialcoordinates.Thealgorithmthatcana—chievethestaticmodelofyarnentityisdesigned.Basedonthefittingcoordinates,theyarnspacegridCO—ordinatesandthestaticmodeloftheyarnentityareobtained.Thedynamicdisplayoftheyarntrajectoryandtheyarnentitygenerationprocessisachieved.TheGUIinterfaceisdesignedandtheprogramthatcanbeindependentfromtheMatlabenvironmentiscompiled.Keywords:3-Dbraiding;staticmodel;dynamicsimulation;graphicaluserinterface(GUI)合,以方形截面和圆形截面的四步法三维编织复合1引言材料为例,研究其运动规律,建立静态网格模型和静态实体模型,同时进行运动仿真。三维编织复合材料是一种新型的复合材料,虽然其出现较晚,发展时间不长,但是已经在国民经2三维编织复合材料四步编织运动济各个领域,特别是在航天航空领域占据重要地位。传统的二维材料受力之后易分层,严重影响其四步编织运动是最常用且被研究得最多的编力学性能,而三维编织复合材料一次成型不分层,织工艺,下面分别以方形截面和圆形截面为例,对因此具有高的比模量和比强度、抗冲击、耐腐蚀、良四步编织运动进行简要说明。好的疲劳抗性等。目前最常用的三维编织方法是2.1方形截面四步编织运动四步法和二步法,且四步法是研究最多的编织方方形截面四步编织运动每四步为一个机器循法’。环,具体的编织过程如图1所示。由图1可知,方本文将三维编织工艺和计算机仿真技术相结形截面的四步编织运动第一步和第三步沿水平方收稿日期:20120730;修回日期:20130128基金项目:国家自然科学基金资助项目(51145010)通信地址:430074湖北省武汉市华中科技大学软件学院Address:SchoolofSoftware,HuazhongUniversityofScienceandTechnology,Wuhan430074,Hubei,P.R.China
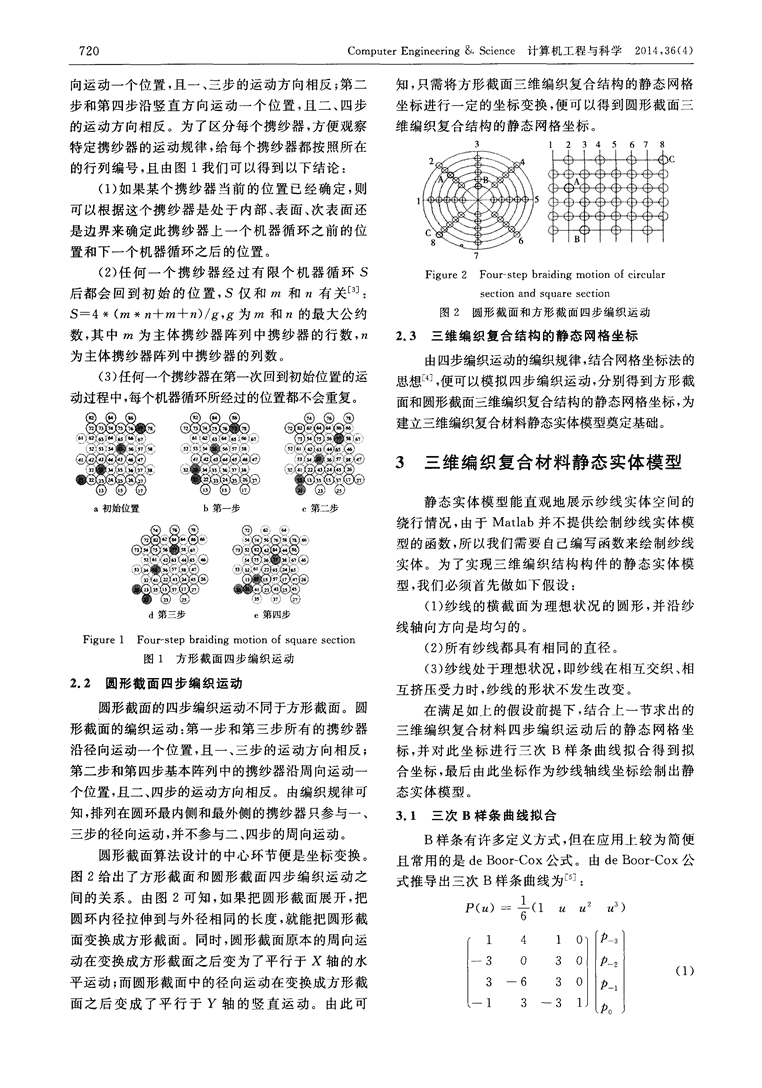
720ComputerEngineering&Science计算机工程与科学2014,36(4)向运动一个位置,且一、三步的运动方向相反;第二知,只需将方形截面三维编织复合结构的静态网格步和第四步沿竖直方向运动一个位置,且二、四步坐标进行一定的坐标变换,便可以得到圆形截面三的运动方向相反。为了区分每个携纱器,方便观察维编织复合结构的静态网格坐标。312345678特定携纱器的运动规律,给每个携纱器都按照所在弋.,一\厂_I—的行列编号,且由图1我们可以得到以下结论:》《、,≥一(1)如果某个携纱器当前的位置已经确定,则\//\/、≥帅《≥《≥《》醢}可以根据这个携纱器是处于内部、表面、次表面还、,、/、/、,/rr弋:是边界来确定此携纱器上一个机器循环之前的位,r—B置和下一个机器循环之后的位置。,(2)任何一个携纱器经过有限个机器循环sFigure2Four—stepbraidingmotionofcircular后都会回到初始的位置,S仅和m和有关]:sectionandsquaresectionS一4*(m*n++)/g,g为m和的最大公约图2圆形截面和方形截面四步编织运动数,其中为主体携纱器阵列中携纱器的行数,2.3三维编织复合结构的静态网格坐标为主体携纱器阵列中携纱器的列数。由四步编织运动的编织规律,结合网格坐标法的(3)任何一个携纱器在第一次回到初始位置的运思想Ⅲ,便可以模拟四步编织运动,分别得到方形截动过程中,每个机器循环所经过的位置都不会重复。面和圆形截面三维编织复合结构的静态网格坐标,为建立三维编织复合材料静态实体模型奠定基础。瓣瓣辫3三维编织复合材料静态实体模型静态实体模型能直观地展示纱线实体空间的a初始位置b第一步c第二步绕行情况,由于Matlab并不提供绘制纱线实体模型的函数,所以我们需要自己编写函数来绘制纱线实体。为了实现三维编织结构构件的静态实体模辫型,我们必须首先做如下假设:(1)纱线的横截面为理想状况的圆形,并沿纱d第三步e第四步线轴向方向是均匀的。Figure1Four-stepbraidingmotionofsquaresection(2)所有纱线都具有相同的直径。图1方形截面四步编织运动(3)纱线处于理想状况,即纱线在相互交织、相2.2圆形截面四步编织运动互挤压受力时,纱线的形状不发生改变。圆形截面的四步编织运动不同于方形截面。圆在满足如上的假设前提下,结合上一节求出的形截面的编织运动:第一步和第三步所有的携纱器三维编织复合材料四步编织运动后的静态网格坐沿径向运动一个位置,且一、三步的运动方向相反;标,并对此坐标进行三次B样条曲线拟合得到拟第二步和第四步基本阵列中的携纱器沿周向运动一合坐标,最后由此坐标作为纱线轴线坐标绘制出静个位置,且二、四步的运动方向相反。由编织规律可态实体模型。知,排列在圆环最内侧和最外侧的携纱器只参与一、3.1三次B样条曲线拟合三步的径向运动,并不参与二、四步的周向运动。B样条有许多定义方式,但在应用上较为简便圆形截面算法设计的中心环节便是坐标变换。且常用的是deBoor-Cox公式。由deBoor—Cox公图2给出了方形截面和圆形截面四步编织运动之式推导出三次B样条曲线为_5]:间的关系。由图2可知,如果把圆形截面展开,把P()一I(iu2u3)圆环内径拉伸到与外径相同的长度,就能把圆形截、r面变换成方形截面。同时,圆形截面原本的周向运14P。动在变换成方形截面之后变为了平行于X轴的水—30p平运动;而圆形截面中的径向运动在变换成方形截3—6P一面之后变成了平行于y轴的竖直运动。由此可—13Po
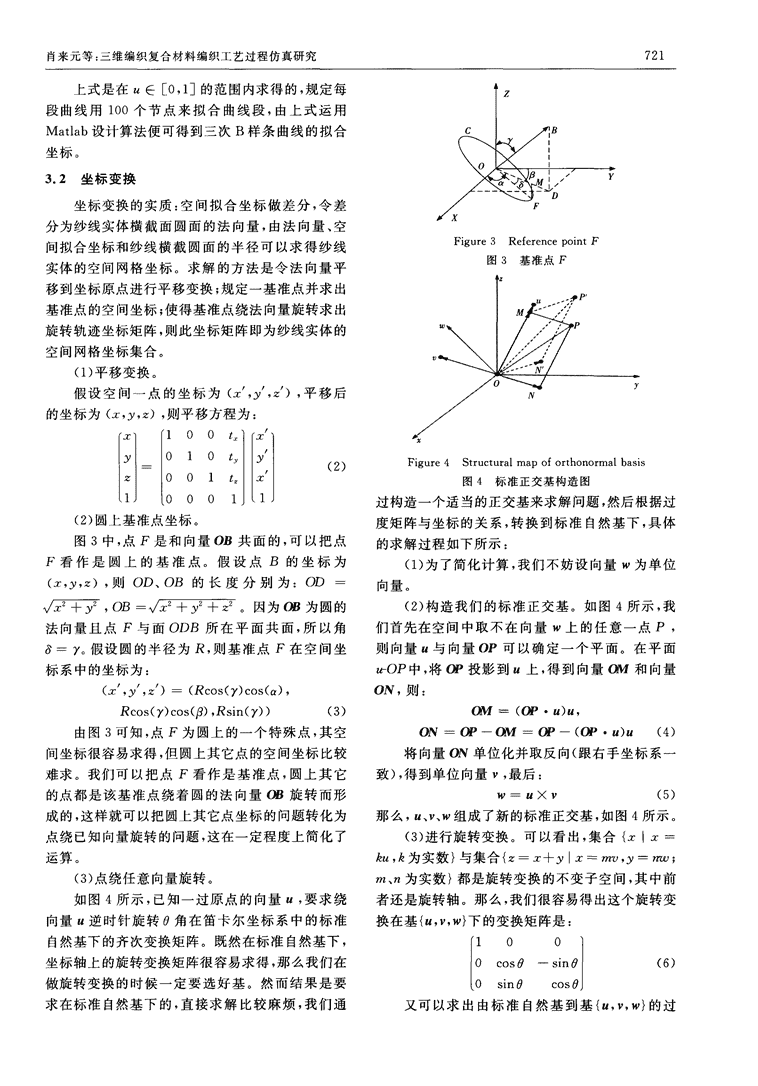
肖来元等:三维编织复合材料编织工艺过程仿真研究721上式是在“∈E0,13的范围内求得的,规定每段曲线用100个节点来拟合曲线段,由上式运用Matlab设计算法便可得到三次B样条曲线的拟合坐标。3.2坐标变换坐标变换的实质:空间拟合坐标做差分,令差分为纱线实体横截面圆面的法向量,由法向量、空Figure3ReferencepointF间拟合坐标和纱线横截圆面的半径可以求得纱线图3基准点F实体的空间网格坐标。求解的方法是令法向量平移到坐标原点进行平移变换;规定一基准点并求出基准点的空间坐标;使得基准点绕法向量旋转求出旋转轨迹坐标矩阵,则此坐标矩阵即为纱线实体的空间网格坐标集合。(1)平移变换。假设空间一点的坐标为(.z,Y,z),平移后的坐标为(,Y,),则平移方程为:,1O0t-z,010t(2),001t-zO0011(2)圆上基准点坐标。图3中,点F是和向量OB共面的,可以把点F看作是圆上的基准点。假设点B的坐标为(z,Y,z),则OD、0B的长度分别为:019一~/。+Y,OB一~/z+Y。+z。因为OB为圆的法向量且点F与面ODB所在平面共面,所以角一),。假设圆的半径为R,则基准点F在空间坐标系中的坐标为:(,Y,z)一(Rcos(7)cos(a),Rcos(y)cos(p),Rsin(),))(3)由图3可知,点F为圆上的一个特殊点,其空间坐标很容易求得,但圆上其它点的空间坐标比较难求。我们可以把点F看作是基准点,圆上其它的点都是该基准点绕着圆的法向量OB旋转而形成的,这样就可以把圆上其它点坐标的问题转化为点绕已知向量旋转的问题,这在一定程度上简化了运算。(3)点绕任意向量旋转。如图4所示,已知一过原点的向量“,要求绕向量”逆时针旋转角在笛卡尔坐标系中的标准自然基下的齐次变换矩阵。既然在标准自然基下,坐标轴上的旋转变换矩阵很容易求得,那么我们在做旋转变换的时候一定要选好基。然而结果是要0剖0㈣求在标准自然基下的,直接求解比较麻烦,我们通
722ComputerEngineering&Science计算机工程与科学2014,36(4)l“口训la方形截面静态实体模型剖h圆形截面静态实体模型Figure5Staticentitymodel要剖图5静态实体模型就可以满足携纱器的动画制作要求;同时,纱线的空间运动希望保留其运动轨迹,我们通过plot3函数就能够满足其要求。程序设计总的思想是:每一个运动步骤画出所有的携纱器及纱线对象;然后刷新屏幕,下一个运动步骤再画出所有的携纱器及纱线,循环往复直到所有的运动步骤都完成为止。我们以第3节求出的三次B样条曲线的拟合坐标作为纱线运动的空间坐标来设计算法,绘制出四步法方形截面纱线的动态轨迹图。图6为方形截面四步法4*4三维编织纱线轨迹动态展示图截图。4.2三维编织过程纱线实体动态生成4三维编织过程纱线轨迹动态展示三维编织复合材料纱线实体动态生成的主要实现思想为:假定一个纱线平均连续分成段,且和实体动态生成规定为第i段纱线,i∈[1,n]且为整数,则整根4.1三维编织过程纱线轨迹动态展示纱线可用L表示:L一>:,其eete表示第走根—l用Matlab进行动画制作主要有三种方式:电纱线,则所有的纱线可表示为L一>:L,其中m影动画、擦除动画和质点动画。根据各种动画制作一1的特性,我们选择擦除动画作为三维编织过程纱线为纱线总的数目。第一个循环之后,所有的纱线绘轨迹的动态展示。制出n段,第二个循环之后所有的纱线均绘制出绘制携纱器的运动过程,我们希望能够达到携n段且段不擦除,以此类推,直到所有纱线的纱器运动但是其运动所经过的轨迹并不保留的效段全部绘制完成,则绘制的过程就是纱线实体动态果;而对于纱线的空间运动,我们希望保留其运动生成的过程。图7为圆形截面四步法4*8三维编轨迹。根据擦除动画制作的描述,我们可以把携纱织纱线实体动态生成过程截图,其中Rin一4,器对象的擦除属性“EraseMode”设置成Xor,这样Rout一8
肖束等:二维编织复合材料编织工艺过程仿真研究723完成方形截面和圆形截面四步编织法的静态网格模型和静态实体模型的绘制、纱线轨迹生成的动态展示、纱线实体动态生成过程的展示等功能。GUI设计界面如图8所示.对于方形截来说,图中所需输入的编织参数川和分别为主携纱器阵列的行数和列数;对于圆形截面来说川和”分别为主携纱器阵列径向携纱器数和心向携纱lO器数,Rin和Rout为圆形截面编织物的内径和外径。:=:麓窦辫■I_,·啪t_日_’崦^●■·mnFigure8GUIof3-Dbraidingprocess图8三维编织工艺GUI6结束语本文以四步编织法为基础,建立了方形截面和圆形截面三维编织复合结构的静态实体模,.实现了纱线轨迹运动的动态展示和纱线实体的动态成展示,并设计实现厂三维编织成型I艺仿真GUI。本文构建的三维编织成型L艺(U1.使用户的操作更加方便,不需要_r解数的功能和调用方式便可以方便地实现所需的功能.蚪町以根据不同的编织参数建立不同的模型,仪需输入编织参数,Figure7Dynamicdisplayoftheyarnentitygenerationprocess点击所需功能的按钮便可以完成功能需求。川户图7纱线实体生成过程动态展示可以通过本设计,在产品生产之前就直观地r解各种编织参数下产品的形状以及纱线的运动轨迹和5三维编织成型工艺仿真GUI纱线实体的生成过程。这在很大程度}:缩短_r产品的设计、生产和交付周期。降低_r牛产成_小.提高GUI是图形用户界面,像许多高级编程语言了生产效率。一样,Matlab也有用户界面开发环境。在Matlab本文建立的均为数学模型,并没有考虑纱线之环境下设计GUI,可以设计出简洁的界面,通过点间相互力的作用,也没有考虑纱线的大小_不1J编织过击GUI界面上的按钮调用某些函数来实现预定的程中编织速度的影响。功能。纱线的大小和编织过程中编织速度的小『西j均本文主要设计实现三维编织成型工艺GUI,可能影响最终编织物的几何形状.这均为今后进一整个GUI可实现编织工艺参数的输入、根据参数步研究的重点之一。
724ComputerEngineering&Science计算机工程与科学2014,36(4)版社,2008参考文献:[1]DongFu—yun,WangChun-min,DongJuan.Developmentandapplicationof3Dtextilecomposites[J].FiberComposites,2001,37(3):37-40.(inChinese)E23SunXue—kun,SunChangjie.Mechanicalpropertiesofthree—dimensionalbraidedcomposites[J].CompositeStructures,2004,65(3-4):485—492.[3]HanQi—rui.Patternofthebobbinmovementin3Dbraidprocessforcomposite[JJ.JournalofTianjinInstituteofTex—tileScienceandTechnology,1994,13(2):1-5.(inChinese)[4]WangBo—feng.Studyonthegeometricmoldingsimulationandalgorithmof3Dbraidedcomposites[D].Wuhan:HuazhongUniversityofScienceandTechnology,2006.(inChinese)[5]WangRen—hong,LiChong-iun,ZhuChun-gang.ComputergeometrytutorialEM~.Beijing:SciencePress,2008.(inChi—nese)附中文参考文献[1]董孚允,王春敏,董娟.三维纺织复合材料的发展和应用[J].纤维复合材料,2001,37(3):3740.[3]韩奇睿.复合材料三维编织工艺底盘运动规律FJ].天津工业大学学报,1994,13(2):1-5.[4]汪博峰.三维编织复合材料几何成型仿真及算法研究[D].武汉:华中科技大学,2006.turer.hisresearchinterestsincludemechanism,mechanicalEs]王仁宏,李崇军,朱春钢.计算机几何教程[M].北京:科学出kinetics,andmechanicsofcompositematerials.