

- 2.40 MB
- 2022-06-17 14:58:25 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
天津纺织工学院学报第卷第期劝户呀了、叼卜仗叼。复合材料三维编织工艺底盘运动规律韩其睿纺织工学院天津,摘要本文对三维编织工艺引纱器的运动规律进行了探讨得出了一些有用的结论这些结论对于指导三维编织工艺设计和计算机辅助设计系统的研初具有重要意义,,关键词复合材料三维编织底盘运动一一又一邓一,一,!厂引言三维编织技术起步于八十年代,之后便迅速发展起来这项技术主要应用于制作复合材料三维编织结构复合材料是不分层的整体和传统的金属材料比较,它具有比模量大,比强度高,各向异性,特殊力学藕合性好,可设计性好等一系列优点,同时它又克服了层状结构复合材料层间强度低,易冲击损伤的缺点三维编织技术创造了一种新的复合材料结构形式随着三维编织技术的发展,已有多种编织方法相继出现目前比较流行的编织工艺方法主要为四步法和两步法本文讨论了四步法三维编织工艺引纱器的运动规律这些规律对于三维编织工艺设计,特别是对于不同纤维的混杂编织,对于三维编织复合材料计算机收稿时间工一。一,,韩其容男岁副教授一一
年天津纺织工学院学报辅助设计系统的研制都具有一定的指导意义四步法编织工艺过程图为四步法编织工艺过程示意图图中的圆圈表示挂纤维束的部件,称为引纱器方框内的引纱器构成了编织主体除此之外,方框外还有一些引纱器四步法编织工艺过程可描述如下交错移动各行见图一交错移动各歹」见图一交错移动各“幼状右。。干备备行见图一交错移动各一卜一列见图一叫卜一。O以上四步构成今护,一个机器循环这四,寺。十。今。步完成后如果不考0000000虑各个引纱器的区00000000000000别,机器回到初始状0000000。。态随着这样机器循}护,环的不断进行纤维图l编织工艺过程束互相交织而成为三维编织物2引纱器的运动规律nn+mn,,在编织主体为m义的机器上共有m十个引纱器在编织过程中这些引纱器不.,停的运动这些运动具有一定的规律性2.1几个概念:.步距两个相邻引纱器之间的距离称为一个步距:.现行位置引纱器在某一时刻所处的机器位置称为该引纱器的现行位置:,,,后继位置经过一个机器循环后引纱器将离开现行位置到达一个新位置这一新.位置称为该引纱器的后继位置:,.前趋位置现行位置相对后继位置来说是前趋位置:,机器上的引纱器按其现行位置可分为五类方框外的引纱器称为外引纱器方框内的,,,引纱器如果其所在行的左端有一外引纱器其所在列的上端有一外引纱器称该引纱器.,,.为左上引纱器依此类推可有左下引纱器右上引纱器和石下引纱器,:根据上述介绍可得如下结论
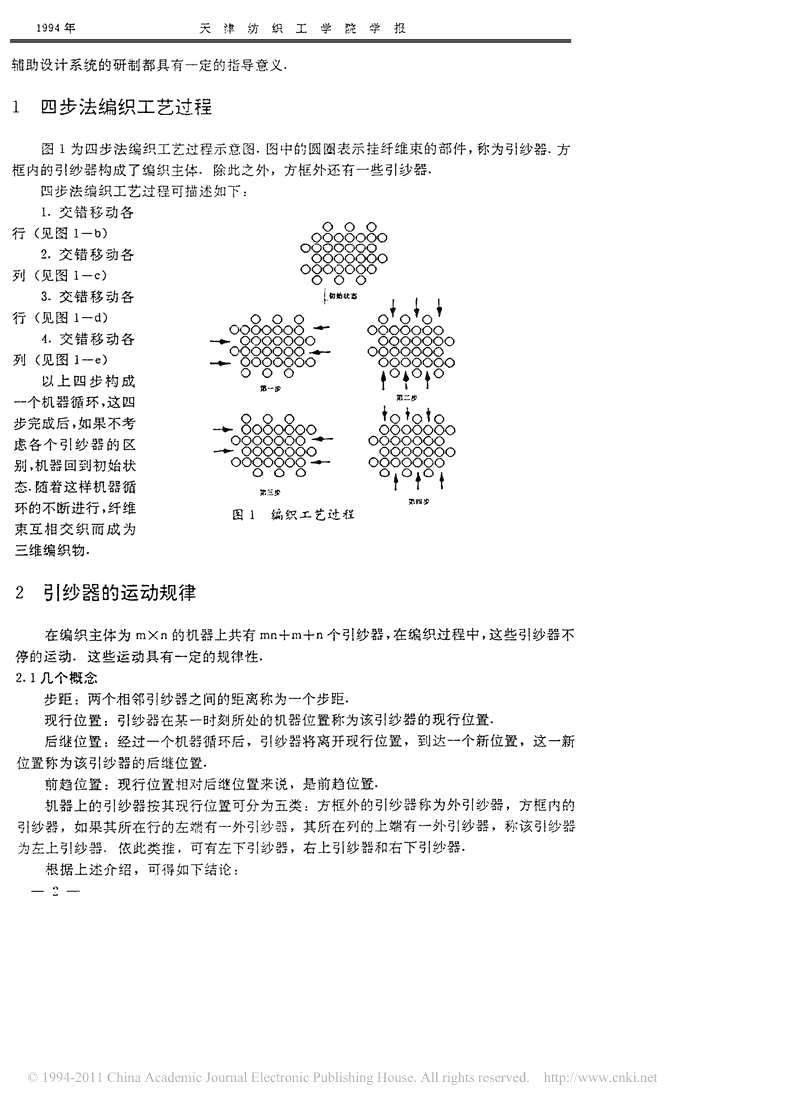
:2韩其睿复合材料三维编织工底盘运动规律第期¹若某引纱器的,现行位置确定则其前趋位置和后继位置均.唯一确定º机器上任一引,纱器经过有限个机器循环运动回到其初始。乳鬓乳位置000也O勺O0000000»机器上任一引0000000,000纱器首次回到初始位,置的运动过程中所经图2引纱器的的后继位五.过的位置均不重复,,.这就是说任何一个引纱器在运动过程中年经过的位置构成一闭合的链.22现行主位置与后继位置的关系,.下面讨论引纱器的现行位置与后继位置的关系设编织主体阵列为mxn设某引纱器,,,,:.2)的现行位置为(ij)后继位置为(sj)参见图,则在如下:a若该引纱器为左上引纱器关系(参见图2一和图2一b),,;,in¹=i一2i~j+2当i)1j(一1i:,:nº=i一1j=j当j=;,,,=s1n»ij=j+1当i一j(,,:,ni=i一1j一j+2当i)1j=一1¼,,.同理可讨论左下引纱器右上引纱器和右下引纱器,,:若该引纱器为外引纱器不妨设为上边外引纱器则有如下关系第1行左端有一外引纱器(参见图2一c)i:,n¹一2+1当」<:,:ni二1=1一ºjj+当」第l行右端有一外引纱器(参见图2一d)s;,¹=1j一j一当j>1:=2,:1ºij=j一当j>l,,.从上述讨论可知左上引纱器的后继位置在其右上方直至到达边或边外当左上引纱器n,,运动到上边或上边外(不在第列上)其后继位置将变为在其右方或右下方左上引纱器.,也将变为左下引纱器当左上引纱器运动到右边或边外(不在第1行上)其后继位置将变为在其上方或左上方,左上引纱器也将变为右上引纱器,当左上引纱器运动到右上角(第.,,,1行第n列)其后继位置在上边外该上边外引纱器的后继位置在其左下方此时左上,.,.,引纱器变为外引纱器之后又成为右下引纱器同理可讨论其他情况也就是说机器上任何一个引纱器随着编织机器循环的进行,沿着一定的方向运动(右上,右下,左上,左一3一
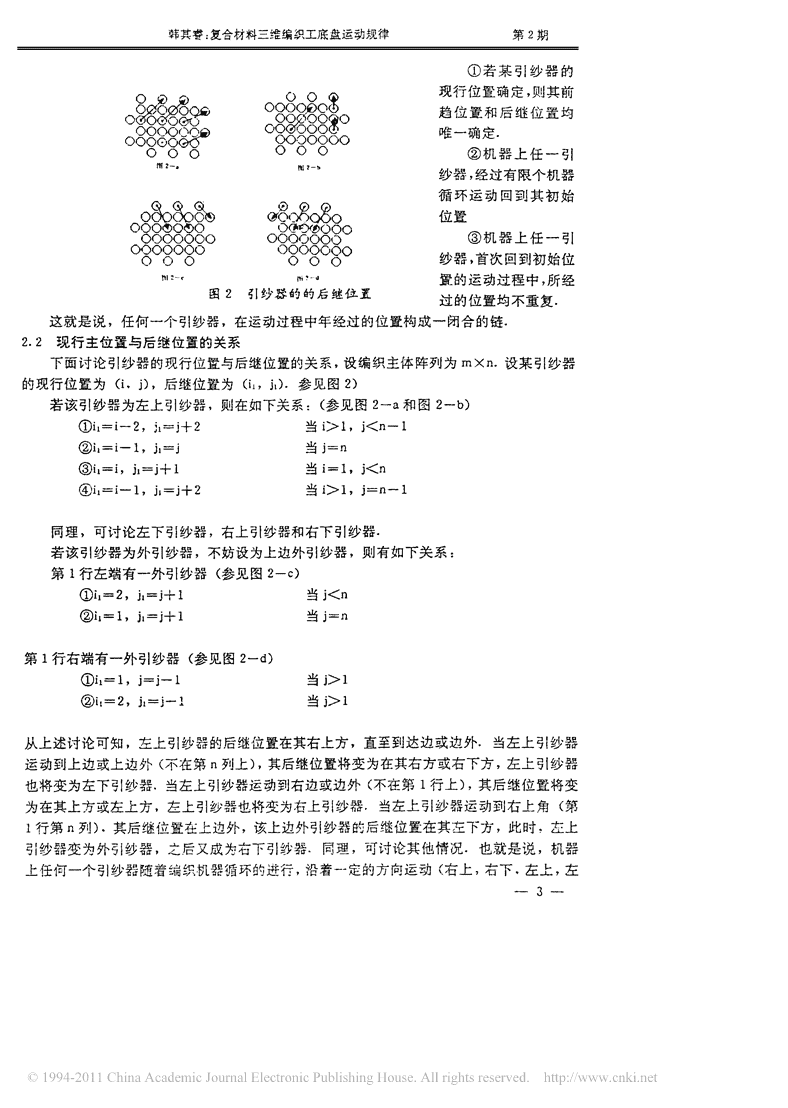
年天津纺织工学院学报a图3一引纱器的运动轨迹图3一b移动后引纱器的运动轨迹.,,下)直至运动到边上或边外才会改变方向到达上边时运动方向由左上变为左下或由.,,,.右上变为右下到达右边时运动方向由右上变为左上或由右下变为左下依此类推因:此可有如下结论,机器上的任何一个引纱器在运动过程中至少到达上下左右边(或外面)位笼各一次才..能回到其初始位置(角属于相邻两边共有).23引纱器运动的光学性质,,t如果把外引纱器的位置稍微移动就会发现引纱器的运动与光的反凳具有惊人的相.似之外泛见图3):,,移动规则为上边外引纱器向下移动半步距若第1行左端有外引纱器则上边外引,,.,纱器向右移动半步距否则向左移动半步距依此类推可得其他边外引纱器的移动妙.,.a则按上述规则移动后引纱器的运动轨迹可画成图3一b的形式图3一与图3一b的实.,.质是一样的因此以图3一b形式讨论问题所得结论对图3一a形式同样适用由图3一b可得:,¹引纱器在编织过程中按450角方向运动碰到矩形框的边框后按光学反射性质运.动n,m个步距.º矩形框的长为个步距高为,n,»任一引纱器首次回到某初始位置的过程中最多碰上下边框各次碰左右边框各.m次),¼任一引纱器经过有限个机器机器回到其初始位置的运动过程中碰上下边框的次数,。相等碰左右边框的次数相等.24位置的分组a,A,,a设为任一引纱器其现行位置为经过有限个机器循环后引纱器必然回到位置A,a,.把引纱器回到其初始位置的运动过程中所经过位置的全体为一组记作G(A)关于G(A),:有如下结论,G(A)则有关系式:¹设C是机器上任一位置若C任G(C)=G(A)s个位置,,º设某组中有则该组中任一位置上的引纱器经过s个机器循环后必然回.到其初始位置·.,,,二n»设编织主体阵列为mxm的最大公约数为g则机器上的位置可分为g组,:¼任一位置组中含有的位置数相同为一4一
:韩其瞥复合材料三维编织工底盘运动现律第2期S=(mn十m+n)/g000¹O½任一引纱器经吕。00À公00。。OOÀ妙00À¼00妙Q过S个机器循环回到00必000孕。00必.00。必OOQ@00其初始位置000eOOQ必O,、O。必00À000公¼这里结论(1)000¼O,2()是显然的下面对(3)项结论作一简单说图410又6阵列分组情况.明任取一引纱器,设该引纱器在回到其初始位置的运动过程中,碰上边框i次,碰右边框,.j次则该引器沿横向移动的总距离为2刃沿纵向移动的总距离为2汕由于运动方向为对,.角线方向所以引纱器回到其初始位置的充分必要条件为横向总距离与纵向总距离相等:即有2im2‘1二1……(1):r,n:n设m=m/g=/g:,,,,:,显然mn均为整数且nl;n互质代入(1)式得2imrg=Zjnrg,,,r,由此。可得结论引纱器碰上边次碰右边m次即可回到其初始位置也就是说引纱r.。。器的运动轨迹只是底盘上全部位置的。/m~l/9所以结论3成立3结束语,.,本文对三维编织工艺引纱器的运动规律进行了探讨并给出一些结论通过这些结论可.,以对纱线的交缠情况进行研究和了解这对于编织工艺设计特别对于混杂纤维编织工艺.设计具有一定的指导意义参考文献...,杨桂等复合材料三维整体编织结构技术与特性复合材料学报19929(l).,二rluna.,一se.strueturenasso巧rrL主VHdMEl讼khAAlyif3一BraidedPrefor侧forComlxitesPa:eour一,,..,:一srreorn、sex:飞sThFtPPfJTtIt199081(4)419514一