
- 216.50 KB
- 2022-06-17 14:55:06 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
基于预制体边界反射方法的三维四向编织复合材料几何建模复合材料学报taMateriaeComositaeSinicaAcP()文章编号:00—351201404—010806—168第3014年1卷第6期12月2Vo1.31No.6December0142基于预制体边界反射方法的三维四向编织复合材料几何建模马明1,王琦2,陈利*1,汪剑鸣2,张荣华3(1.天津工业大学先进纺织复合材料教育部重点实验室,天津30387;2.天津工业大学电子与信息工程学院,天津30387;00)3.天津工业大学电气工程与自动化学院,天津303870方法,有效摘要:R)PB针对预制体巾纱线路径复杂,儿何建模耗时较长的问题,提出了一种预制体边界反射(地缩短了几何建模过程中建立纱线运动模型的计算时间。在此基础上,开发了基于S1idWorks软件的CAD仿真o建模系统,可模拟不同编织参数下的三维编织预制体整体结构。与传统建模方法相比,R方法可在不影响预制PB体几
何建模精度的前提下,明显缩短仿真时间。因此,可明显提高编织工艺设计的效率。该力*法为复杂几何结构预制体的细观结构和机械性能研究奠定了基础。关键词:CAD仿真建模系统复合材料;三维编织;纱线运动模型;预制体几何结构;中图分类号:330.1;TP391;TS105文献标志码:BTAometricmodelinfor3D4rectionalbraidedcomositesbasedonGedi-gPreformboundarref1ectionmethodPy1223★1,WANGMAMCHEZHANGinQiNLiJianminRonhua,g,WANGg,g(,,1.KofEducationTianinPoltechnicUniversitforAdvancedTextileComositesofMinistrLaboratorejyyypyy,,;TianinPoltechnicUniversitTianin300387,China2.SchoolofElectronicsandlnformationEnineerin
,;&AutomationTianinPoltechnicTianin300387,China3.SchoolofElectricalEnineerinJyJgg,)Tianin300387,ChinaUniversity攀J:foritisalwasAbstracttothecomlexitofthearnathsinsidethereform,theeometricmode1ininOwyyppggpyg,w,,reflection(PBR)methodasroosedandthetimeconsumin.Anefficientmethodname1reformboundargypyppcomutationtimetoestab1ishthemode1ofarnsmotionineometricmodelinrocesswasshortenedeffective1.pyggpy,FurthermoreCADsimu1ationsstemwasdeve1oedbasedontheSolidWorkssoftware.Interaleometricdescri—ypggp,onsof3Dbraidedreformw
ithdifferentarameterscouldbesimu1ated.Comaredwiththetraditionamethodtipppeshor—tthePBRmethodsinificantlnsthesimulationtimewithoutaffectintherecisionofreformeometriegyppgg,accelerated.Thenewmethodestabliofbraidinrocessdesiniseffectivelmodelin.Asaresultheefficienc—gpgygyesthefoundationofmicrostructureandmechanica1roertiesanalsisofthereformswithcomlexeometrieshppyppgstructures.:;;m;;Kewordsomosites3Dbraidotonmode1ofarnsreformeometricstructureCADsimulationsstemcpypgyy三维编织复合材料由于具有不分层,质轻,耐烧蚀以及比强度、比模量、抗冲击性和强度高等优
点,广泛应用于航空航天、军工、生物医疗、体育1]。三维编织复合材料预制体由用品和建筑等领域[;录用日期:;网络出版时间:收稿日期:1838561314143:292020201一1一1一0—0—0—11111网络出版地址:www.cnki.netkcmsdoi10.13801j.cnki.fhc1xb.20140516.002.htm1;天津市高等学校科技发展基金计划;天津市应用基础与前沿技术研究计划(基金项冃:国家自然科学基金(JCQNJC02600)11072175)14()20130320:通讯作者:陈利,博士,教授,博士生导师,研究方向为纺织复合材料。E—mailchenlitu.edu.cn@jp,C,16MiQiLiealmofo3D4dbrcobaonrel604—11.Mananhent.Geometricdelinrrectionalaidedmositessedform—ipg,Wggp[],,():flectionthodJ.Aetateriaemositaenica20143161
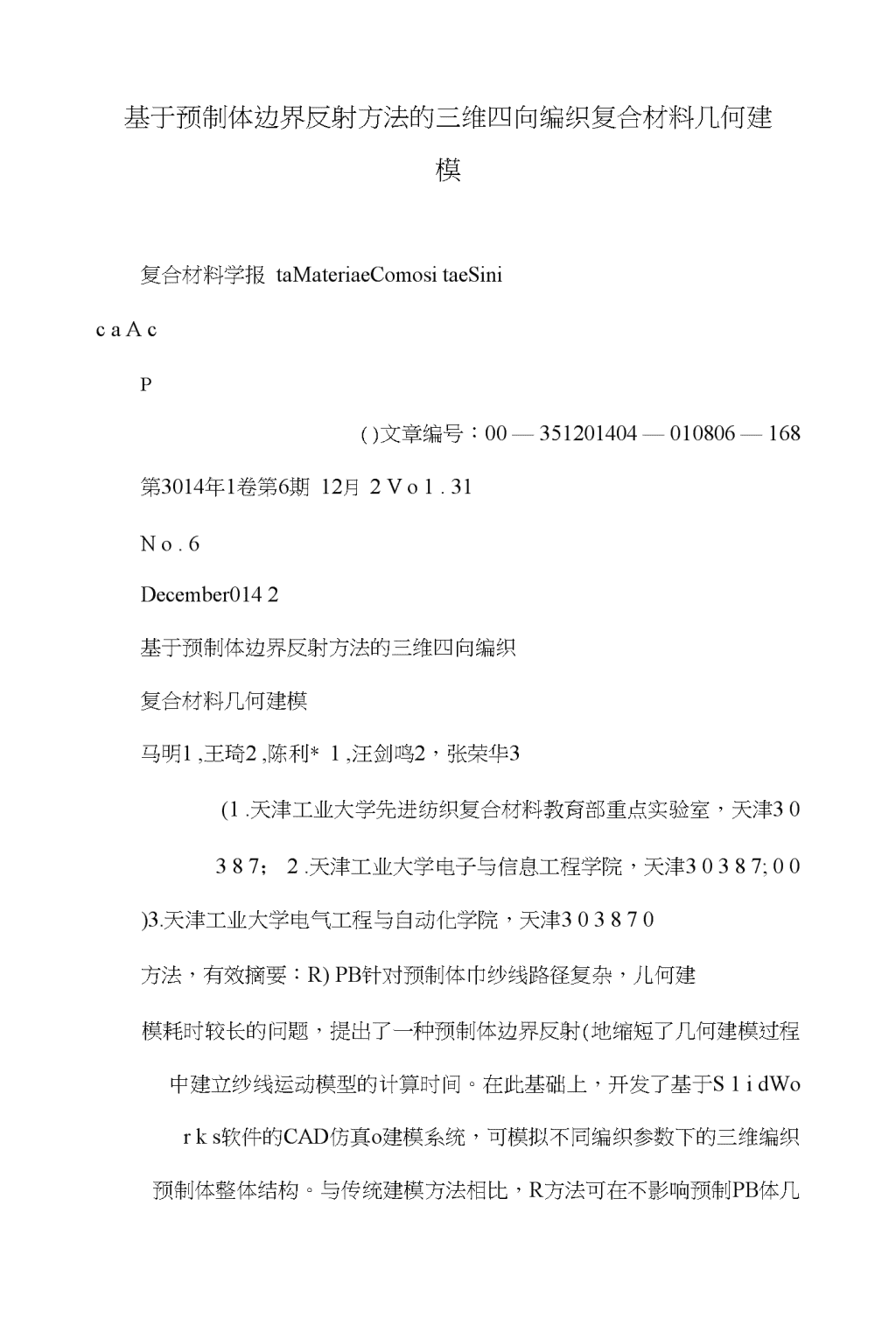
604—11.remeMaCoSi16boundarpy两根或多根编织纱线彼此相互交织形成,因此在任意方向上都具有良好的机械性能。此外,预制体结构设计灵活,对I形、H形及管形等异形结构可一次成型。为了高效、安全并合理地使用三维编织复2]。合材料,需准确估计复合材料的力学性能[型在计算时间和仿真结果方面进行了比较,证明了R方法可在不影响仿真效果的前提下,简化运动PB模型并提高计算效率。1三维四步法纱线运动规律1.1三维四步法编织过程三维四步法编织屮,携纱器携带编织纱线运动,使编织纱线彼此相互交织,因此纱线编织结构主要取决于携纱器的运动规律。主体携纱器按预制体的横截面形状排列成m行和n列的主体阵列,附加携纱器间隔排列在主体阵列的周围。4X4矩形预制体携纱器的初始位置如图1所示O三维编织复合材料的力学性能由两个因素决定。一是复合材料本身的性质,二是预制体的细观几何结构。在纱线材料成分固定的情况下,决定预制体性能的主要因素为儿何结构,特别是预制体内部纱线的走向和分布。因此,合理的结构设计对预]34—。制体力学性能的准确估计及改进至关重要[自20世纪80年代起,国内外许多研宄者都对三维四步法矩形编织
结构进行了研究,建立了预制[]体纱线运动模型。Ko5首次将矩形预制体屮纱线[]的分布情况用单元结构表示。Lh1i@1<116基1和£一3于编织机工作原理,模拟了矩形预制体内的单元结[][]构。Cun8提出了单胞结构的概念,611等7和8117并将单胞中的单元结构分为角部、表面和内部等多[]种区域类型。Wnun9考虑了编织过程中纱ag和S线相互交织发生的接触和挤压,以及纱线受摩擦力和拉力发生变形的情况,开发了一套动态模拟纱线[0]引入最小二乘近轨迹的CD仿真系统。陈利等1A[1]似,预测单胞结构中纱线的走向。Zani1hg和L对陈利等提出的方法进行了改进,优化了预制体表面和角部区域的纱线运动模型,并将纱线运动模型12]分析了矩形预由二维扩展到三维空间。邵将等[图14X4矩形预制体携纱器的初始位置Fi.1Initialarranementofarncarriersofggy4X4suarereformqp制体中纱线的空间位置,并通过Bzier曲线拟合法e确定了纱线路径。目前己有多种纱线运动模型用于预制体的几何结构仿真,但仅局限于
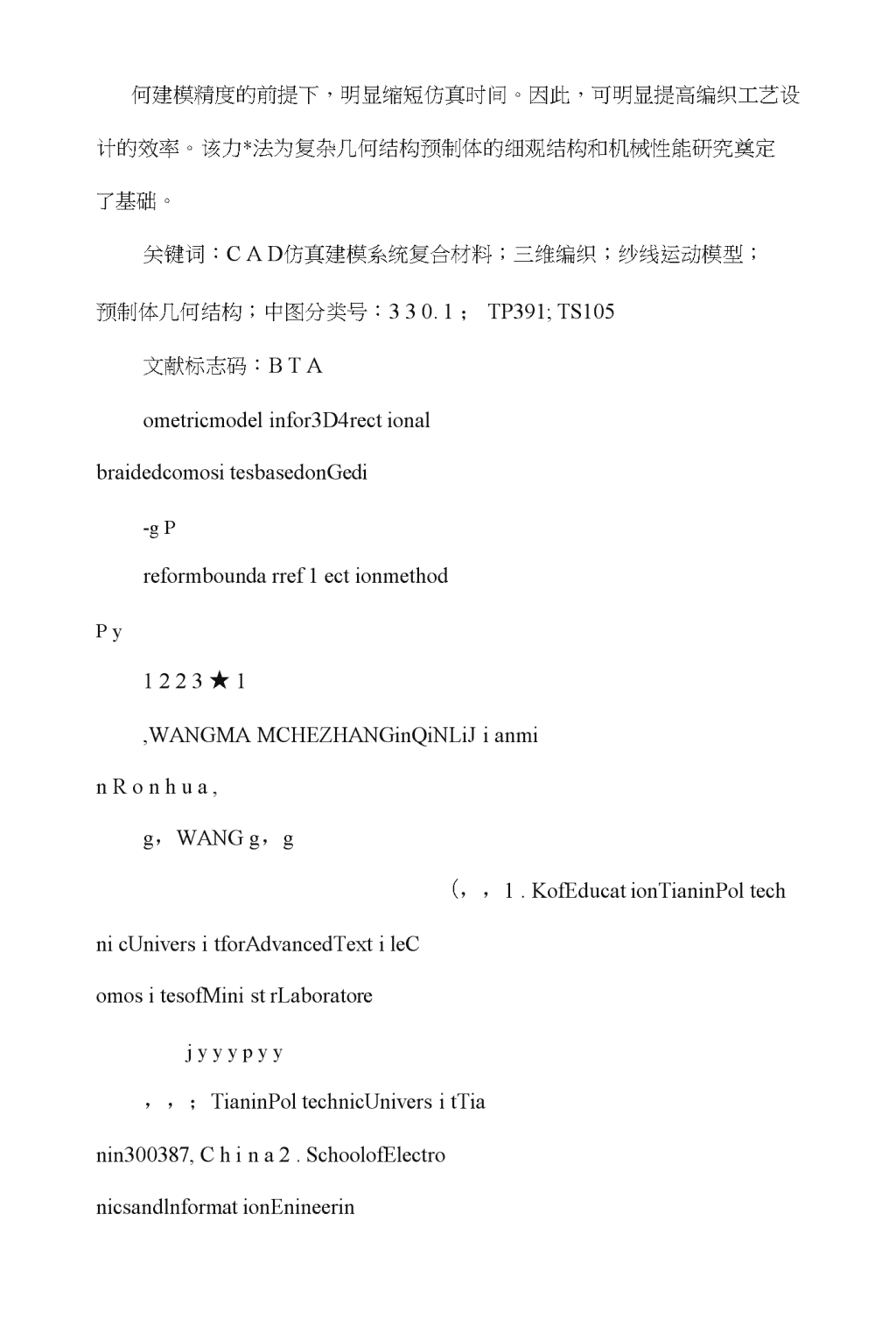
简单编织结构,即主体纱数一般较小。而对预制体,特别是大型的复杂预制体结构而言,工艺设计效率与结构仿真效率息息相关。从准确预测预制体性能和高效设计生产的角度考虑,几何结构仿真过程需在不影响精度的前提下进一步简化,而仿真过程简化的核心在丁纱线运动模型的优化。笔者分析了三维四步编织法的纱线运动规律,方法描述纱线的运动提出了预制体边界反射(R)PB轨迹,简化了纱线运动模型。利用Vsua10++结1合Mat1ab作为开发工具,对S1idWorks进行二次o开发,采用PR方法构建了纱线运动模型,对任意B编织参数的三维预制体几何结构实现了自动构建与仿真。本文还将PR方法与传统的最小二乘法模B图2为4X4矩形预制体1个编织循环周期内的携纱器位置和运动步骤。第1步,携纱器按行向)交错式步进,如图2(所示;第2步,携纱器按列a(向交错式步进,如图2所示;第3步和第4步分b)()0别与第1步和第2步相反,分别如图2和图2cd所示。经过这4步运动,完成1个编织循环。纱线不断反复这4个运动步骤,再加上打紧运动和织物输出运动,就可完成编织过程,纱线相互交织在一起,形成具有一定长度的预制体。2纱线编织几何数据和单胞模型1.本文以立式编织机矩形预制体编织规律为例进行研究。由子每1个携纱器上携带1根编织纱线,因此参与编织的纱线总数()N=mn+m+n1
式中:m为主体行数;n为主体列数。任一预制体都是由纱线从初始状态经历Ns步编织后回到初始状态,这样周而复始形成的。把纱线由初始状态的•1606*复合材料学报轨道穿越内部,遍历所有边界,经过若干步后回到起始位置。在预制体内部,由于纱线本身的连续性及编织工序中打紧力的作用,纱线在预制体内的路径最短,可认为是直线;纱线在表血和角部结构发11]。生弯曲[结构经历NS步编织后又回到初始状态的结构这一循环称为组织循环,NS称为组织循环步数。把在1个组织循环里的1根纱线称为纱线单胞。将投影轨迹相同的纱线单胞归为一类,每类单胞中,纱线仅运动初始位置不同。对于主体为mXn的矩形预制体,纱线单胞可分为Y类,其中:()CY=Gm,n)2D(式中:GCD为求最大公约数运算。每类单胞中的纱线数S均相同,且/OS=NY3S越大,即分类越多,说明预制体结构越复杂,预制体中纱线的密度也越大。以4X4矩形编织为例,按单胞分类的4X4矩形预制体携纱器轨迹和纱线投影轨迹如图3所示。图屮黑色的圆代表路径相同的携纱器,虚线代表相应的纱线投影轨迹。
根据上述参数,携纱器经过1个组织循环回到初始状态,即完成1个单胞所经历的步数()4Ns=4S以4X4方形预制体为例,纱线总数N=24。纱线单胞可分为4类。每类单胞中有6个携纱器路径相同,即S二6。每个携纱器1个组织循环移动4步回到初始位置。Ns=2为有效构建纱线运动模型和预制体几何模型,需满足以下4个假设:(1)纱线横截面为圆形,其半径为r,运动方程中纱线的位置由其横截面的中(心坐标表示;2)在一定长度内的编织工艺稳定,(纱线的线密度均匀;3)所有纱线的材料相同,且(在编织过程屮具有相同的形状和弹性;4)预制体内纱线填充因数对所有类型的单元结构有效(包括。预制体内部、表面和角部结构)1预制体边界反射方法2.10]采用最小二乘法分段对携纱器的相陈利等[关运动位置点进行了直线拟合,建立了编织纱线运动二维模型。根据纱线在实际空间中的运动轨,基于最二小乘法建立了纱线迹三维运动模型,预制体内部纱线由直线模拟,预制体表面和角部的纱线由螺旋线模拟,得出纱线单胞的三维空间分布数学模型。但在传统最小
二乘法中,纱线每运动一步都要重新计算坐标位置,计算过程耗时较长。木文深入挖掘纱线编织规律中蕴含的几何信息,提出一种PR方法,以简化纱线运动B2建立纱线运动模型在连续编织过程中,每一个携纱器沿固定折线3按单胞分类的4X4矩形预制体携纱器轨迹和纱线投影24X4矩形预制体1个编织循环周期内的携纱器位置和运动步骤anementsandmovementsofcggmachineccleof4X4suarereformyQP轨迹(黑色的圆代表路径相同的携纱器)Fi.3Carriertracesandarnathsof4X4suarereformgypqpclassifiedbunitcel1(b1ackcirclesindicatecarriersossessiyPg)thesameathp
在PR方法中,每个单胞模型可分为两种基B)预制体内部的直线结构;()预制木单元结构:(12体边界以空间曲线表示的表面和角部结构。以图1屮12#纱线为例进行分析,其单胞模型#纱线的初始运如图4所示。图中(X0,Y0)为12动位置,a为相邻携纱器间的距离。在1个组织中,12#纱线由上边界出发,通过预制体内部到达左边界,随后分别到达下边界和右边界,最后到达上边界,形成1个纱线单胞。根据携纱器的运动规律,当纱线运动到预制体表面时即折返,回到主体内部,因此纱线所在直线的斜率发生改变,纱线接近预制体表妞时的折返路径如图5所示。由图5可看出,纱线在预制体表面区域形成了[13]指出,纱线每步的空间运n1个角结构。Yag等动方向可由其关于成型方向(本文中为z轴方向)的方向角确定:bcrctan0=a()5Pa式中:Pb和Pc分别为每行和每列相邻携纱器间的距离;Pa为预制体花节长度。根据本文的研宄对象,式(满足以下3个条5))研究对象为等距矩形编织过程,即每行和件:(1(每列相邻携纱器间的距离相同;2)编织工艺稳定,因此预制体结构统一,纱线的线密度均匀,所有纱线轨迹穿过相邻携
纱器间的屮点,携纱器运动轨迹与纱线运动轨迹的关系如图6所示,可得Pb=Pc=22/;()花节长度在纱线每步运动中保持一致,即23a预制体中所有区域满足Pa=p,其中p为常数。图5纱线接近预制体表面时的折返路径F5Returnathofarnnearsurfacereioni.Pygg图4图1中12#纱线的单胞模型Fi.4Unitcellmodelofl2#yninFi.1argg图6携纱器运动轨迹与纱线运动轨迹的关系F6Re1ationshibetweencarriertraceandarnathi.18*60复合材料学报线部分,与表示表面和角部结构的空间曲线相切,完成连续的三维纱线运动轨迹计算。2PBR方法步骤2.R方法可分为以下5步执行:PBO定义主体边界。主体边界决定每个纱线单1胞中纱线的运动范围:上边界:corsyu0+p=Y
()9在预制体表面,携纱器在边界停动1步后改变()),有运动方向返回
内部,如图5所示。根据式(a5bcanntaO0=1=t2=22PaPa显然,可求出00"y空间平面上的投影01和02在x1和0":2()6/a"=t"=/=ltann0012a2即()785012在纱线单胞中,由于预制体表面的纱线轨迹关于携纱器路径对称,纱线运动到表面时,会发生角反射。即纱线的运动方向在预制体表妞发生°25,其法线为携纱器路径。根据反射理论,了“反射”反射回预制体内部的直线斜率发生改变,由1变为一1,或由一1变为1。纱线运动到角部区域时,其路径发生两次反射后回到预制体内部。因此角部结构可视为由两个表面结构组成,如图7所示。式;屮:yup为上边界坐标。左边界:
xrcos10—a—ft=Xe式中:x1ft为左边界坐标。e下边界:4()10a—rcosydO—3wn二Yo()11式中:ydown为下边界伞.标。右边界:xa+rcosr0+2t=Xihg4式中:xriht为右边界坐标g()12O确定纱线初始运动方向。在携纱器完成初2始两步移动后,将纱线经过的位置点相连,确定纱线初始路径,并从预制体内部延长至边界。以12#纱线(见图1)为例,纱线初始运动方向由直线AB决定,即从预制体的上边界运动到左边界。易知初始路径方向AB的斜率为1。O确定预制体内部纱线单胞直线结构的线性3方程。以1AB的线性方程为2#纱线为例,yA0+Y0+B=x-X图7角部结构纱线单元的结构模型Fi.7Yarnunitm
ode1forcornerreion
,XmAn^x^XmxiaB)2()13式中:,XmXman为主体左边界的x轴坐标;xiAB为直线AB与主体上边界交点的x轴坐标。随后纱线路径“反射”到下边界,即直线CD。纱线从预制体表面运动到内部,直线CD的斜率由(),直如图5和图8所示)1变为一1,结合反射点(a线CD所在纱线路径可表示为(,XmyCD=-x+XO+YO-iaCD)nxXmx2()14式中:,XmaD与主体下边界交点的x轴CxD为直线C坐标。纱线的初始运动力向和直线运动方程可由携纱器初始两步运动的力*向获得。当纱线运动到预制体偏转,进表面时,根据“反射”特性,其方向发生9°0入预制体内部。根据反射点的位置以及反射纱线的斜率,可确定预制体巾反射纱线的运动方程。这一过程一直持续到反射纱线中包含的初始运动点停止,得到预制体中纱线直线轨迹的二维投影,即纱线单胞中的直线部分。表面和角部结构可通过相邻边界建立的空间曲线获得。最后沿z轴方向旋转直同一纱线单胞中的另外两条直线方程也可用相似方法获得:
直线EF所在的纱线路径可表示为
,XmyEO+YO-Enx)F=x-XiF^x^Xma2()15式中:,XmF与主体下边界交点的x轴EiF为直线En坐标;Xmax为主体右边界的x轴坐标。直线GH所在的纱线路径可表示为描角度e以及在边界和角部结构的编织步数,可得两种结构纱线移动位置的二维坐标,结合沿z轴的花节长度可得三维坐标。S2两点间的距离为1与SL=X1-X2Y1-Y2+则圆弧半径()17r=/sinl20定义/(/sin120)给定初始点()18yG0+Y0-H=-x+X(,XmGnx)iHxXma2()16r=
式中:,XmH与主体上边界交点的x轴GniH是直线G坐标。()用空间曲线表示角部和表面结构。由于纱4线的柔软连续性,表面和角部结构反射角应由平滑曲线取代,纱线单元屮由圆弧表示的表面和角部结构如图8所示。本文用圆弧表示空间曲线轨迹的二维投影。圆弧的起点和终点为主体边界与预制体内部纱线直线路径的交点。给定圆弧的起点SX1,1(,其中X1
您可能关注的文档
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看