

- 307.36 KB
- 2022-06-16 14:41:48 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
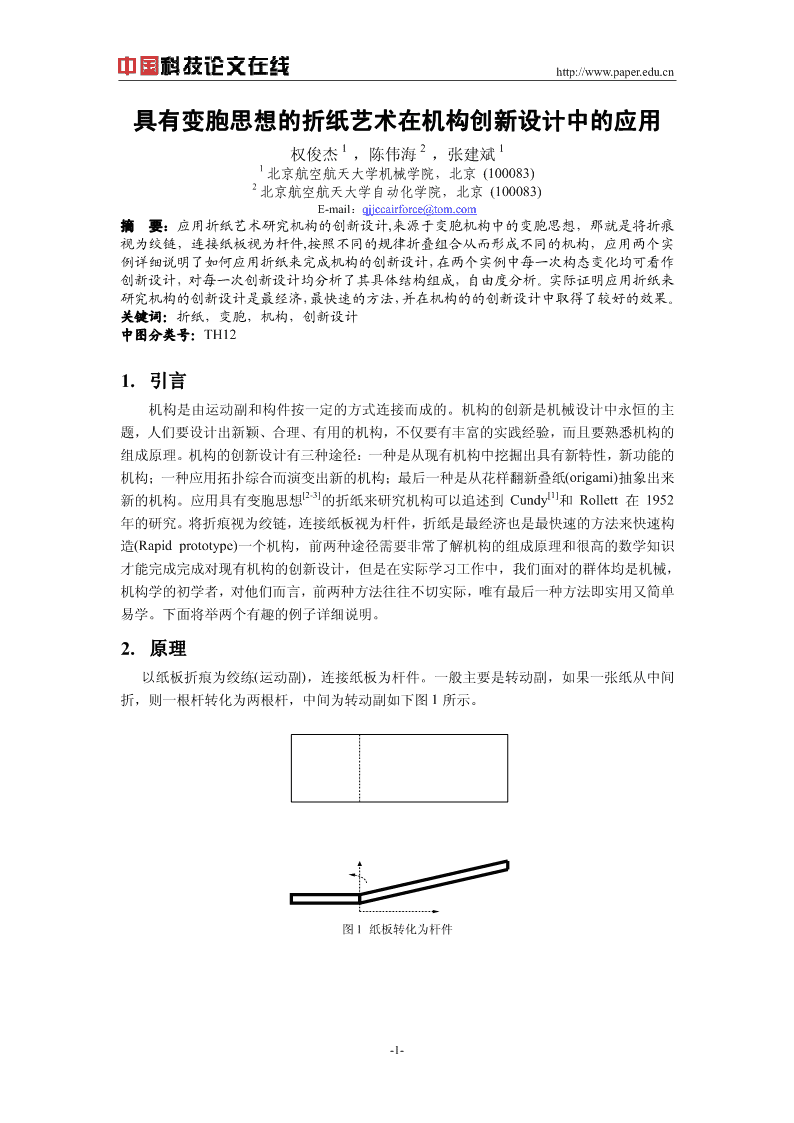
http://www.paper.edu.cn具有变胞思想的折纸艺术在机构创新设计中的应用121权俊杰,陈伟海,张建斌1北京航空航天大学机械学院,北京(100083)2北京航空航天大学自动化学院,北京(100083)E-mail:qjjccairforce@tom.com摘要:应用折纸艺术研究机构的创新设计,来源于变胞机构中的变胞思想,那就是将折痕视为绞链,连接纸板视为杆件,按照不同的规律折叠组合从而形成不同的机构,应用两个实例详细说明了如何应用折纸来完成机构的创新设计,在两个实例中每一次构态变化均可看作创新设计,对每一次创新设计均分析了其具体结构组成,自由度分析。实际证明应用折纸来研究机构的创新设计是最经济,最快速的方法,并在机构的的创新设计中取得了较好的效果。关键词:折纸,变胞,机构,创新设计中图分类号:TH121.引言机构是由运动副和构件按一定的方式连接而成的。机构的创新是机械设计中永恒的主题,人们要设计出新颖、合理、有用的机构,不仅要有丰富的实践经验,而且要熟悉机构的组成原理。机构的创新设计有三种途径:一种是从现有机构中挖掘出具有新特性,新功能的机构;一种应用拓扑综合而演变出新的机构;最后一种是从花样翻新叠纸(origami)抽象出来[2-3][1]新的机构。应用具有变胞思想的折纸来研究机构可以追述到Cundy和Rollett在1952年的研究。将折痕视为绞链,连接纸板视为杆件,折纸是最经济也是最快速的方法来快速构造(Rapidprototype)一个机构,前两种途径需要非常了解机构的组成原理和很高的数学知识才能完成完成对现有机构的创新设计,但是在实际学习工作中,我们面对的群体均是机械,机构学的初学者,对他们而言,前两种方法往往不切实际,唯有最后一种方法即实用又简单易学。下面将举两个有趣的例子详细说明。2.原理以纸板折痕为绞练(运动副),连接纸板为杆件。一般主要是转动副,如果一张纸从中间折,则一根杆转化为两根杆,中间为转动副如下图1所示。图1纸板转化为杆件-1-
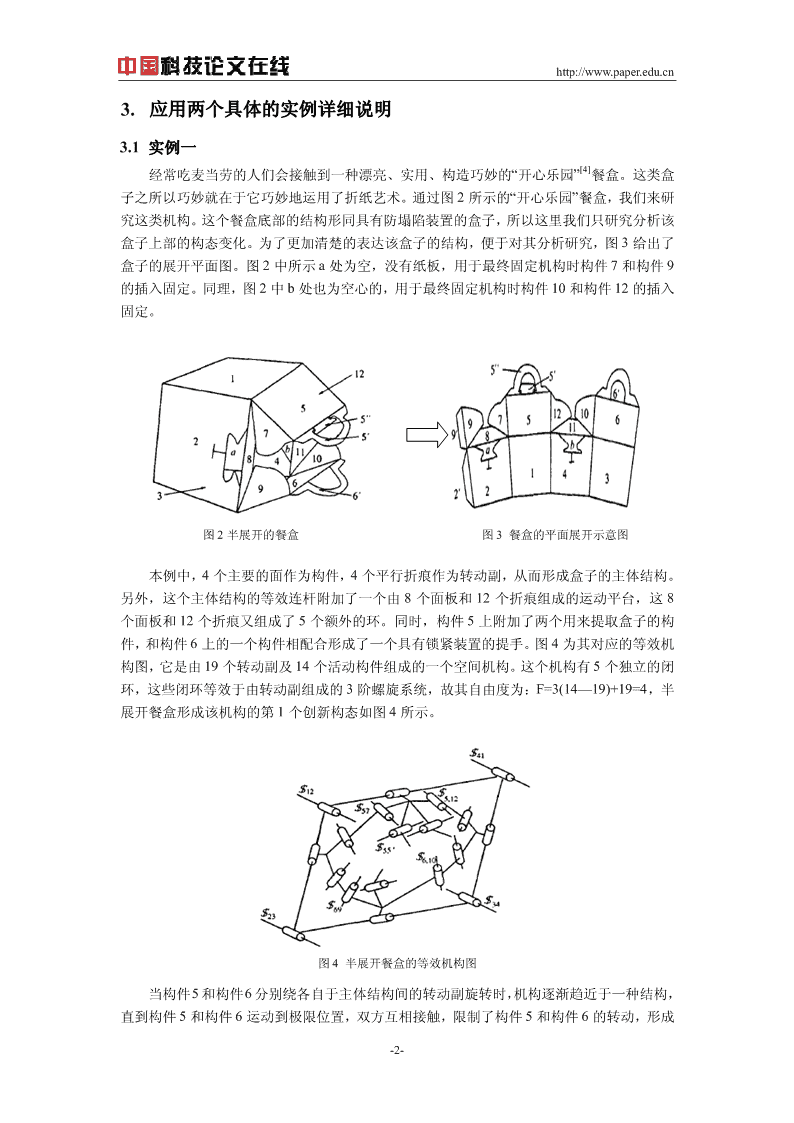
http://www.paper.edu.cn3.应用两个具体的实例详细说明3.1实例一[4]经常吃麦当劳的人们会接触到一种漂亮、实用、构造巧妙的“开心乐园”餐盒。这类盒子之所以巧妙就在于它巧妙地运用了折纸艺术。通过图2所示的“开心乐园”餐盒,我们来研究这类机构。这个餐盒底部的结构形同具有防塌陷装置的盒子,所以这里我们只研究分析该盒子上部的构态变化。为了更加清楚的表达该盒子的结构,便于对其分析研究,图3给出了盒子的展开平面图。图2中所示a处为空,没有纸板,用于最终固定机构时构件7和构件9的插入固定。同理,图2中b处也为空心的,用于最终固定机构时构件10和构件12的插入固定。图2半展开的餐盒图3餐盒的平面展开示意图本例中,4个主要的面作为构件,4个平行折痕作为转动副,从而形成盒子的主体结构。另外,这个主体结构的等效连杆附加了一个由8个面板和12个折痕组成的运动平台,这8个面板和12个折痕又组成了5个额外的环。同时,构件5上附加了两个用来提取盒子的构件,和构件6上的一个构件相配合形成了一个具有锁紧装置的提手。图4为其对应的等效机构图,它是由19个转动副及14个活动构件组成的一个空间机构。这个机构有5个独立的闭环,这些闭环等效于由转动副组成的3阶螺旋系统,故其自由度为:F=3(14—19)+19=4,半展开餐盒形成该机构的第1个创新构态如图4所示。图4半展开餐盒的等效机构图当构件5和构件6分别绕各自于主体结构间的转动副旋转时,机构逐渐趋近于一种结构,直到构件5和构件6运动到极限位置,双方互相接触,限制了构件5和构件6的转动,形成-2-
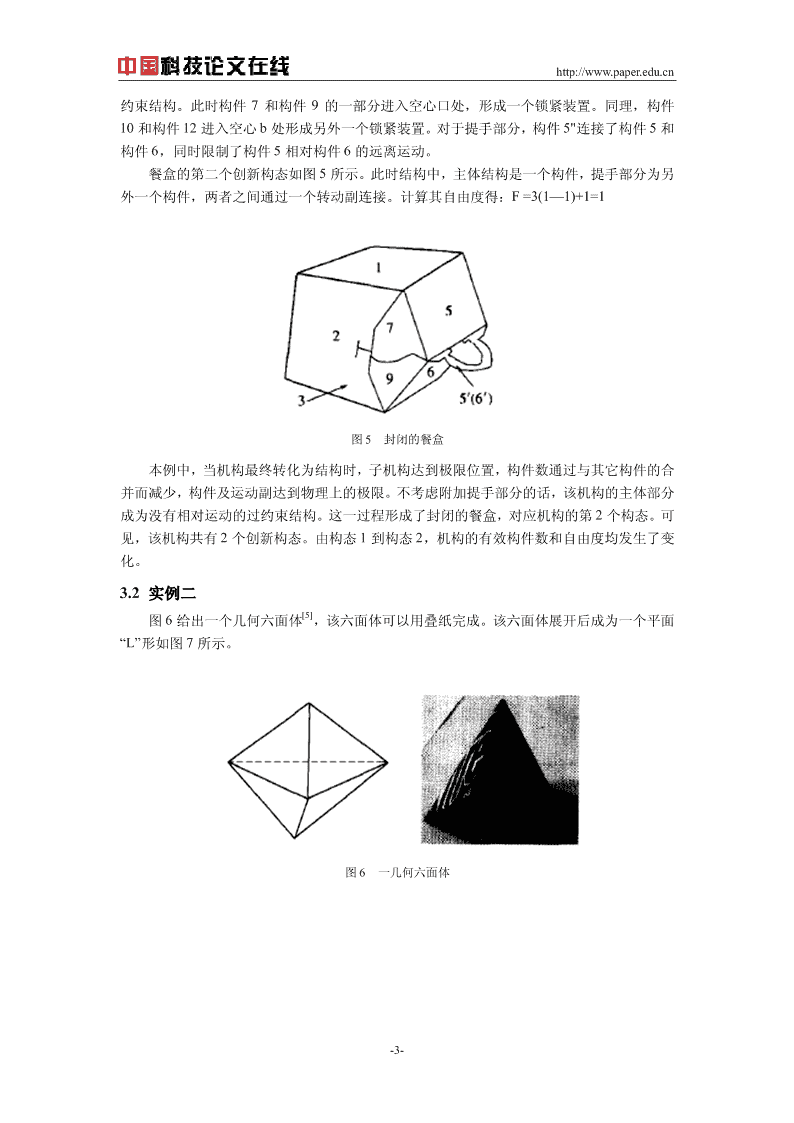
http://www.paper.edu.cn约束结构。此时构件7和构件9的一部分进入空心口处,形成一个锁紧装置。同理,构件10和构件12进入空心b处形成另外一个锁紧装置。对于提手部分,构件5"连接了构件5和构件6,同时限制了构件5相对构件6的远离运动。餐盒的第二个创新构态如图5所示。此时结构中,主体结构是一个构件,提手部分为另外一个构件,两者之间通过一个转动副连接。计算其自由度得:F=3(1—1)+1=1图5封闭的餐盒本例中,当机构最终转化为结构时,子机构达到极限位置,构件数通过与其它构件的合并而减少,构件及运动副达到物理上的极限。不考虑附加提手部分的话,该机构的主体部分成为没有相对运动的过约束结构。这一过程形成了封闭的餐盒,对应机构的第2个构态。可见,该机构共有2个创新构态。由构态1到构态2,机构的有效构件数和自由度均发生了变化。3.2实例二[5]图6给出一个几何六面体,该六面体可以用叠纸完成。该六面体展开后成为一个平面“L”形如图7所示。图6一几何六面体-3-
http://www.paper.edu.cn图7对应于几何六面体的L形纸板图8一空间等效机构在图7中,除边线外,其余线为折痕。取折痕为旋转副,纸板为连杆,一等效机构可以得到,这就可以抽象出一空间等效机构如图8所示。该机构相邻旋转副有一定的几何约束,构成了一空间机构。旋转副$,$,$和$的轴线在空间相交。旋转副$$$,,1,22,33,44,101,22,32,6共面,$$$,,共面,$$,共面,$$,共面,同时$$,共面。2,33,43,53,44,102,66,86,88,9这些几何约束使得该机构有一定的运动规律。轴$$,$和$运动使轴$连杆11,22,33,44,101,2与轴$连杆10变为一体。此时,轴$$,$和$变为一球面机构的四个旋转4,101,22,33,44,10副,并有三条支链,形成一个新的空间机构,这一机构见图9。图9一新的空间机构机构创新1其相应的叠纸变化是运动纸板1~4和10。当纸板10与纸板1连接,新的构造脱颖而出,见图10。这一新的构造可见于巧克力盒或者其他盛装零食的纸盒(图11)。这种纸盒的盒身具有1个自由度,以便调解和适应不同的抓握姿态,这一新型的机构构态可由前述的机构转化而来。-4-
http://www.paper.edu.cn图10机构以连接构件表示图11相应结构机构创新2第二构态出现当旋转副$和$运动使得杆6和杆5重叠。此时运动副$$$2,63,51,22,33,4$$和$受到几何限制,丧失运动副作用。杆1至杆6和杆10变为一体。机构只剩4,102,63,5下旋转副$$和$可以运动。机构自由度变为3,见图12。相应的杆件结构可见图1,76,88,913,机构变为六面体半结构具有剩余的3自由度,其相应的实际结构可见图14。该结构可用作具有活动入口的简易帐篷。图12带有两支链的六面体半结构图13相应的杆件结构图14具有活动入口的简易帐篷机构创新3该机构的第三构态由旋转副$和$完成促使杆9连接杆4,此时六边形结构已接近6,88,9完成,见图15,此时机构的自由度为1。最后的完成构态为图16的六边形结构-5-
http://www.paper.edu.cn图15具有1自由度的六面体结构图16完成的六边形结构在折纸过程中机构创新的所有状态变化可由表1列出表1几何六面体的创新构态变化创新构态变化过程等效常规机构自由度1自由运动球面4一杆多支路机构62连接杆5和6球面体一半结构双支路机构33连接杆4和9六面体结构单支路机构14连接杆7和8六面体结构04.结论从以上两个实例可以看出,在机构创新设计中,折纸是最经济也是最快速的方法来快速构造(Rapidprototype)一个机构,如果能够应用折纸的快速成形,将折痕视为绞链,连接纸板视为杆件,我们就能很方便,很快捷的完成一个构形的创新设计,当然我们所完成只是一个概念上机构的创新设计,具体到真实的机构,我们还要考虑到机构学,材料学,运动学,动力学和控制方面等知识的融和。才能完成一个具有特定功能的机构的创新设计。-6-
http://www.paper.edu.cn参考资料[1]CundyHM,RollettAP.Mathematicalmodels.[M]TarquinPublications,1951,234-256[2]DaiJS,ReesJonesJ.MobilityinmetamorphicmechaniSillsoffoldable/erectablekind.[J];In25ASMEBiermialMechanismsandRoboticsConference;Baltimore;1998NewYork;ASME.1998,341-351.[3]DaiJS,ReesJonesJ,Mobilityinmetamorphicmechanismsoffoldable/erectablekinds;[J],ASMETransaction;JournalofMechanicalDesign,121(3):375-382[4]金国光变胞机构的分类及其构态分析[J],机械科学与技术2005,7;164-167[5]戴建生等:一空间变胞机构的拓扑结构变换和对应的矩阵演算机械工程学报,2005,8;30-35[6]杨廷力·机械系统的基本理论-结构学[M]运动学动力学,机械工业出版社,1996,4;23-34[7]高峰·机构学研究现状与发展趋势的思考[J]机械工程学报,2005,8;3-16Applicationofcarton-foldableartfortheinnovativedesignofmechanism121QuanJunjie,ChenWenhai,ZhangJianbin1SchoolofMechanicalEngineering&Automation,BeijingUniversityofAeronauticsandAstronautics,China(100083)2SchoolofAutomationScienceandElectricalEngineering,BeijingUniversityofAeronauticsandAstronautics,China(100083)AbstractThecarton-foldableartisusedtostudytheinnovativedesignofthemechanism.whenthecreasesaretreatedashinges,joiningcardandpaperpanelstreatedaslinks,accordingtothedifferentrulestofoldorunfoldthecartonpaper,andtheinnovativemechanismisbroughtup,twoexamplesareusedinthispaper,whichgiveaparticulardescriptionabouthowtousethecarton-foldablemethodtofinishtheinnovativedesignofmechanism,Ineachexample,withthechangeofcorrespondingconfiguration,newmechanismsarethenproduced,andanalyzedtheconfigurationandmobility,theresultprovedthismethodiseconomicalandefficienttoachievearapid-prototypemechanism.Keywords:carton-fold,metamorphic,mechanism,innovative-design作者简介:权俊杰(1976-),男,吉林长春人,工程师,硕士研究生,主要从事机械设计及理论、机器人控制技术等院的研究;陈伟海(1955-),男,博士。研究领域:机器人学,智能伺服控制,可重构技术,模块化设计。-7-